Howdy,
I have a custom board that is supposed to talk to the LSM303DLHC over I2C with the TM4C1294NCPDT micro controller. I have previously used the peripheral driver to succesfully use UART as well as GPIO functionalities. I have been reading through the I2C peripheral library, the I2C master driver in the sensor library and the LSM303DLHC driver in the sensor library and I did my best to set it up to just read in a loop but I am not getting anything on the SCL or SDA lines (looking with logic analyzer, both are being held high)). I copied my code below and commented on the important things. I have some functions from other parts of my projects in there but they are not being used at all. Any help is appreciated!!
#include <stdlib.h>
#include <stdio.h>
#include <stdbool.h>
#include <stdint.h>
#include <string.h>
#include <math.h>
#include "inc/hw_types.h"
#include "inc/hw_memmap.h"
#include "inc/hw_gpio.h"
#include "piconfig.h" //setting up pins
#include "inc/hw_i2c.h" //used in i2c
#include "inc/hw_timer.h"
#include "driverlib/sysctl.h"
#include "driverlib/pin_map.h"
#include "driverlib/rom_map.h"
#include "driverlib/gpio.h"
#include "driverlib/timer.h"
#include "driverlib/fpu.h"
#include "driverlib/uart.h"
#include "driverlib/i2c.h" //used in i2c
#include "sensorlib/i2cm_drv.c" //used in i2c
#include "sensorlib/i2cm_drv.h" //used in i2c
#include "sensorlib/lsm303dlhc_mag.c"//used in i2c
#include "sensorlib/lsm303dlhc_mag.h"//used in i2c
#include "sensorlib/hw_lsm303dlhc.h"//used in i2c
//typedef struct
//{
// float latitude; //ignore this
// float longitude;
//} position;
//prototype functions
void pinconfig (void); //calls function that configures pins
//void UartInit (void);
//void GpsConfigTX (void);
//position GpsRXData (void);
//float convert_decimal_degrees(float num);
//double azi (float lat1, float lon1, float lat2, float lon2); //ignore these
//void TimerSetup (void);
//void delay(uint32_t);
//void speedprofile(float,float,float, double);
tI2CMInstance sI2CInst;
volatile bool g_bLSM303DLHCMagDone;
void inthandler (void); //created this function to be called by the interrupt handler
void LSM303DLHCMagCallback(void *pvCallbackData, uint_fast8_t ui8Status)
{
// See if an error occurred.
if(ui8Status != I2CM_STATUS_SUCCESS)
{
// An error occurred, so handle it here if required. //this is from sensor library
}
// Indicate that the LSM303DLHCMag transaction has completed.
g_bLSM303DLHCMagDone = true;
}
int main(void)
{
//set clock frequency to 120MHz
uint32_t freq = SysCtlClockFreqSet(SYSCTL_OSC_MAIN|SYSCTL_USE_PLL|SYSCTL_XTAL_25MHZ | SYSCTL_CFG_VCO_480,120000000);
//variables from sensor library
float fMag[3];
tLSM303DLHCMag sLSM303DLHCMag;
//configure pins for SDA+SCL (done with all oter pins in the pinconfig function
pinconfig();
//enable system peripheral and wait until it is ready before moving on
SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C7);
while(!SysCtlPeripheralReady(SYSCTL_PERIPH_I2C7))
{
}
//configure I2C peripheral true for fast data transfers
I2CMasterInitExpClk(I2C7_BASE,120000000,true);
//Clear Master Interrupts
I2CMasterIntClear(I2C7_BASE);
//declare function pointer to the i2c master interrupt handler
void (*Handler)(void);
Handler = inthandler;
//Did not Enable I2C Interrupts
//Register an Interrupt handler for I2C Interrupts that are enabled
I2CIntRegister(I2C7_BASE, (*Handler));
//Initialize Magnetometer (possibility that param #2 is base address of I2C)
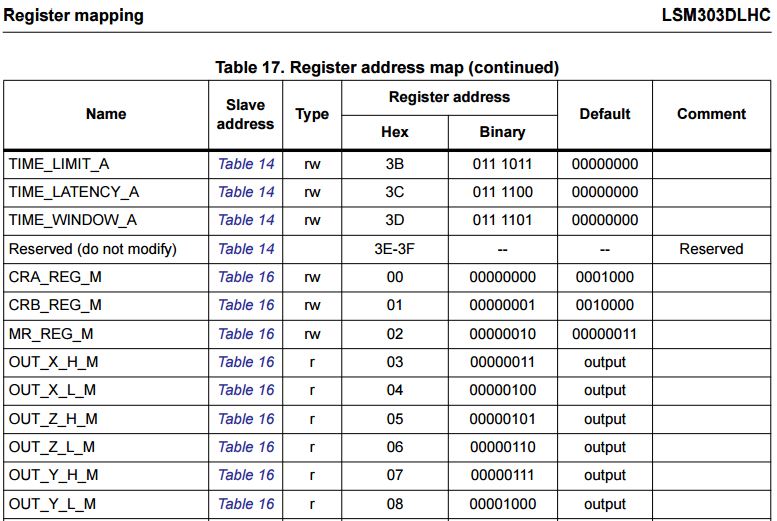
int maginit = LSM303DLHCMagInit(&sLSM303DLHCMag, &sI2CInst,0x3D,LSM303DLHCMagCallback,0);
//read continuously
while (1)
{
g_bLSM303DLHCMagDone = false;
LSM303DLHCMagDataRead(&sLSM303DLHCMag, LSM303DLHCMagCallback, 0);
while(!g_bLSM303DLHCMagDone) //gets stuck here
{
}
//
// Get the new magnetometer readings.
//
LSM303DLHCMagDataMagnetoGetFloat(&sLSM303DLHCMag, &fMag[0], &fMag[1], &fMag[2]);
}
}
void inthandler (void)
{
I2CMIntHandler(&sI2CInst);
}
////-----------------------------------------------------------------------------------------------
void pinconfig(void)
{
// Enable Peripheral Clocks
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_EPHY0);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C7);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_UART4);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOF);
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOK);
//
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTK_BASE, GPIO_PIN_4);
//
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTK_BASE, GPIO_PIN_6);
// Enable pin PA4 for GPIOOutput
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTA_BASE, GPIO_PIN_4);
// Enable pin PA5 for GPIOOutput
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTA_BASE, GPIO_PIN_5);
// Enable pin PA0 for GPIOOutput
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTA_BASE, GPIO_PIN_0);
// Enable pin PA1 for GPIOOutput
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTA_BASE, GPIO_PIN_1);
// Enable pin PA2 for GPIOOutput
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTA_BASE, GPIO_PIN_2);
// Enable pin PA3 for GPIOOutput
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTA_BASE, GPIO_PIN_3);
// Enable pin PF0 for GPIOOutput
MAP_GPIOPinTypeGPIOOutput(GPIO_PORTF_BASE, GPIO_PIN_0);
// Enable pin PD0 for I2C7 I2C7SCL
MAP_GPIOPinConfigure(GPIO_PD0_I2C7SCL);
MAP_GPIOPinTypeI2CSCL(GPIO_PORTD_BASE, GPIO_PIN_0);
// Enable pin PD1 for I2C7 I2C7SDA
MAP_GPIOPinConfigure(GPIO_PD1_I2C7SDA);
MAP_GPIOPinTypeI2C(GPIO_PORTD_BASE, GPIO_PIN_1);
// Enable pin PK0 for UART4 U4RX
MAP_GPIOPinConfigure(GPIO_PK0_U4RX);
MAP_GPIOPinTypeUART(GPIO_PORTK_BASE, GPIO_PIN_0);
// Enable pin PK1 for UART4 U4TX
MAP_GPIOPinConfigure(GPIO_PK1_U4TX);
MAP_GPIOPinTypeUART(GPIO_PORTK_BASE, GPIO_PIN_1);
}