Other Parts Discussed in Thread: BQ76PL536EVM-3, BQ76PL536, MSP-EXP430F5529LP
Good morning,
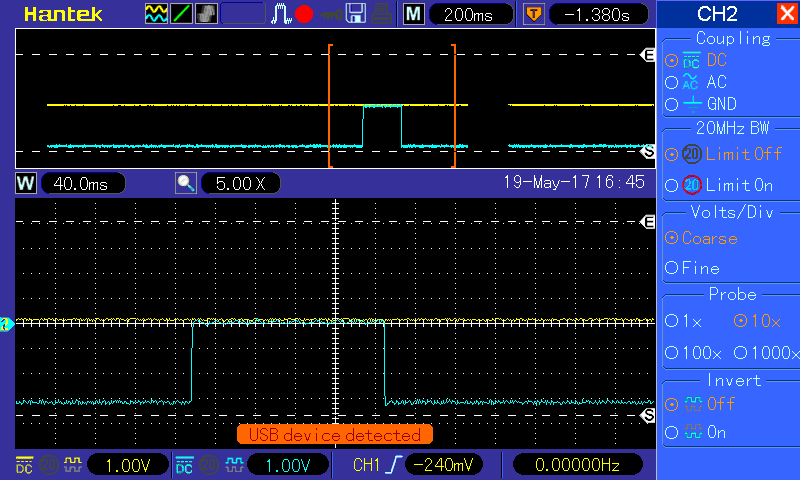
I’m contacting you in reference to a problem with the LaunchPad EK-TM4C123GXL and the SPI communication.
We are trying to establish SPI communication between the EK-TM4C123GXL and the bq76PL536EVM-3 but it is not working.
We are using the following pins from the EK-TM4C123GXL:
- MISO: PA_4
- MOSI: PA_5
- CS: PA_3
- SCK: PA_2
And the attached code.
The code was implemented to perform and autoaddress procedures specific for the bq76PL536 chips. The problem is detected because the chips are not responding after a requested sended by the EK-TM4C123GXL.
We have tried the code with other LaunchPad like the MSP-EXP430F5529LP and it works.
We would very much appreciated if you could provide some help.
Regards,
//LLIBRERIES -------------------------------------
#include <SPI.h>
//VARIABLES ------------------------
int slaveSelectPin = 20;
bool r = true;
int n_devices = 0;
//FUNCIO ENVIAMENT_DADES_DEVICE ------------------------------------------
void ENVIAMENT_DADES_DEVICE (byte device, byte adress, byte dades) {
byte WRITE = ((int)device << 1) + 1;
byte CRCINPUT[3] = {WRITE, adress, dades};
digitalWrite(slaveSelectPin, LOW);
SPI.transfer(WRITE);
SPI.transfer(adress);
SPI.transfer(dades);
SPI.transfer(Pec(CRCINPUT));
digitalWrite(slaveSelectPin, HIGH);
Serial.println("WRITE");
Serial.println("SDO: ");
Serial.println(WRITE, HEX);
Serial.println(adress, HEX);
Serial.println(dades, HEX);
Serial.println(Pec(CRCINPUT), HEX);
}
//FUNCIO CONSULTA_DADES --------------------------------------------
byte CONSULTA_DADES(byte device, byte adress) {
byte answer;
byte crc;
byte READ = ((int)device << 1);
byte l = 0b1;
digitalWrite(slaveSelectPin, LOW);
SPI.transfer(READ);
SPI.transfer(adress);
SPI.transfer(l);
answer = SPI.transfer(0x00);
crc = SPI.transfer(0x00);
digitalWrite(slaveSelectPin, HIGH);
Serial.println("READ");
Serial.println("SDO: ");
Serial.println(READ, HEX);
Serial.println(adress, HEX);
Serial.println(l, HEX);
Serial.println("SDI: ");
Serial.println(answer, HEX);
Serial.println(crc, HEX);
Serial.println();
return answer;
}
//FUNCIO ENVIAMENT_DADES_BRODCAST -------------------------------
void ENVIAMENT_DADES_BRODCAST(byte adress, byte dades) {
byte WRITE = 0b01111111;
byte CRCINPUT[3] = {WRITE, adress, dades};
digitalWrite(slaveSelectPin, LOW);
SPI.transfer(WRITE);
SPI.transfer(adress);
SPI.transfer(dades);
SPI.transfer(Pec(CRCINPUT));
digitalWrite(slaveSelectPin, HIGH);
Serial.println();
Serial.println("BRODCAST");
Serial.println("SDO: ");
Serial.println(WRITE, HEX);
Serial.println(adress, HEX);
Serial.println(dades, HEX);
Serial.println(Pec(CRCINPUT), HEX);
Serial.println();
}
//crcTable --------------------------------
const byte crcTable[256] = {
0x00, 0x07, 0x0E, 0x09, 0x1C, 0x1B, 0x12, 0x15, 0x38, 0x3F, 0x36, 0x31, 0x24, 0x23, 0x2A,
0x2D, 0x70, 0x77, 0x7E, 0x79, 0x6C, 0x6B, 0x62, 0x65, 0x48, 0x4F, 0x46, 0x41, 0x54, 0x53, 0x5A, 0x5D,
0xE0, 0xE7, 0xEE, 0xE9, 0xFC, 0xFB, 0xF2, 0xF5, 0xD8, 0xDF, 0xD6, 0xD1, 0xC4, 0xC3, 0xCA, 0xCD, 0x90,
0x97, 0x9E, 0x99, 0x8C, 0x8B, 0x82, 0x85, 0xA8, 0xAF, 0xA6, 0xA1, 0xB4, 0xB3, 0xBA, 0xBD, 0xC7, 0xC0,
0xC9, 0xCE, 0xDB, 0xDC, 0xD5, 0xD2, 0xFF, 0xF8, 0xF1, 0xF6, 0xE3, 0xE4, 0xED, 0xEA, 0xB7, 0xB0, 0xB9,
0xBE, 0xAB, 0xAC, 0xA5, 0xA2, 0x8F, 0x88, 0x81, 0x86, 0x93, 0x94, 0x9D, 0x9A, 0x27, 0x20, 0x29, 0x2E,
0x3B, 0x3C, 0x35, 0x32, 0x1F, 0x18, 0x11, 0x16, 0x03, 0x04, 0x0D, 0x0A, 0x57, 0x50, 0x59, 0x5E, 0x4B,
0x4C, 0x45, 0x42, 0x6F, 0x68, 0x61, 0x66, 0x73, 0x74, 0x7D, 0x7A, 0x89, 0x8E, 0x87, 0x80, 0x95, 0x92,
0x9B, 0x9C, 0xB1, 0xB6, 0xBF, 0xB8, 0xAD, 0xAA, 0xA3, 0xA4, 0xF9, 0xFE, 0xF7, 0xF0, 0xE5, 0xE2, 0xEB,
0xEC, 0xC1, 0xC6, 0xCF, 0xC8, 0xDD, 0xDA, 0xD3, 0xD4, 0x69, 0x6E, 0x67, 0x60, 0x75, 0x72, 0x7B, 0x7C,
0x51, 0x56, 0x5F, 0x58, 0x4D, 0x4A, 0x43, 0x44, 0x19, 0x1E, 0x17, 0x10, 0x05, 0x02, 0x0B, 0x0C, 0x21,
0x26, 0x2F, 0x28, 0x3D, 0x3A, 0x33, 0x34, 0x4E, 0x49, 0x40, 0x47, 0x52, 0x55, 0x5C, 0x5B, 0x76, 0x71,
0x78, 0x7F, 0x6A, 0x6D, 0x64, 0x63, 0x3E, 0x39, 0x30, 0x37, 0x22, 0x25, 0x2C, 0x2B, 0x06, 0x01, 0x08,
0x0F, 0x1A, 0x1D, 0x14, 0x13, 0xAE, 0xA9, 0xA0, 0xA7, 0xB2, 0xB5, 0xBC, 0xBB, 0x96, 0x91, 0x98, 0x9F,
0x8A, 0x8D, 0x84, 0x83, 0xDE, 0xD9, 0xD0, 0xD7, 0xC2, 0xC5, 0xCC, 0xCB, 0xE6, 0xE1, 0xE8, 0xEF, 0xFA,
0xFD, 0xF4, 0xF3
};
//Calcul CRC ------------------------------------------------
byte Pec(byte crcBuffer[]){
byte crc = 0;
int temP = 0;
for (int i = 0; i < sizeof(crcBuffer) + 1; i++){
temP = crc ^ crcBuffer[i];
crc = crcTable[temP];
}
return crc;
}
//AUTOMATIC ADDRESSING:
int ADDRESSING(){
Serial.println("--------------------------------");
Serial.println("-----------AUTOADDRESS----------");
Serial.println("--------------------------------");
Serial.println();
Serial.println("brodcast resert inicial");
delay(500);
ENVIAMENT_DADES_BRODCAST (0x3c,0xa5); //Brodcast RESET inicial
Serial.println();
int i = 1; //nombre de slaves adre�ades en cada iteracio
int n = 0; //nombre de slaves trobades
while (r){ //TRUE = ha trobat slave a adre�ar
i = 1;
while (i<=n){
CONSULTA_DADES (0x00, 0x00);
ENVIAMENT_DADES_DEVICE(0x00, 0x3b, i);
i++;
}
if (CONSULTA_DADES (0x00, 0x00) != 0){
n++;
Serial.println ("Nova slave trobada");
ENVIAMENT_DADES_DEVICE(0x00, 0x3b, n);
ENVIAMENT_DADES_BRODCAST (0x3c, 0xa5);
}
else{
r = false;
}
}
Serial.println("RESULTAT:");
Serial.print("Nombre de slaves trobades: ");
Serial.println(n);
Serial.println();
i = 0;
while (i < n){
Serial.print("Slave ");
Serial.println(i+1);
i++;
}
return n;
}
//SETUP --------------------------------
void setup() {
SPI.begin();
SPI.setModule(2);
SPI.setBitOrder(MSBFIRST);
SPI.setDataMode(SPI_MODE1);
SPI.setClockDivider(SPI_CLOCK_DIV8);
Serial.begin(9600);
pinMode(slaveSelectPin, OUTPUT);
delay(1000);
int n_devices = ADDRESSING(); //Crida funci� d'acre�ament
SPI.end();
}
//MAIN LOOP -----------------------------------
void loop() {}