Part Number: TM4C123GH6PM
Tool/software: Code Composer Studio
Hi,
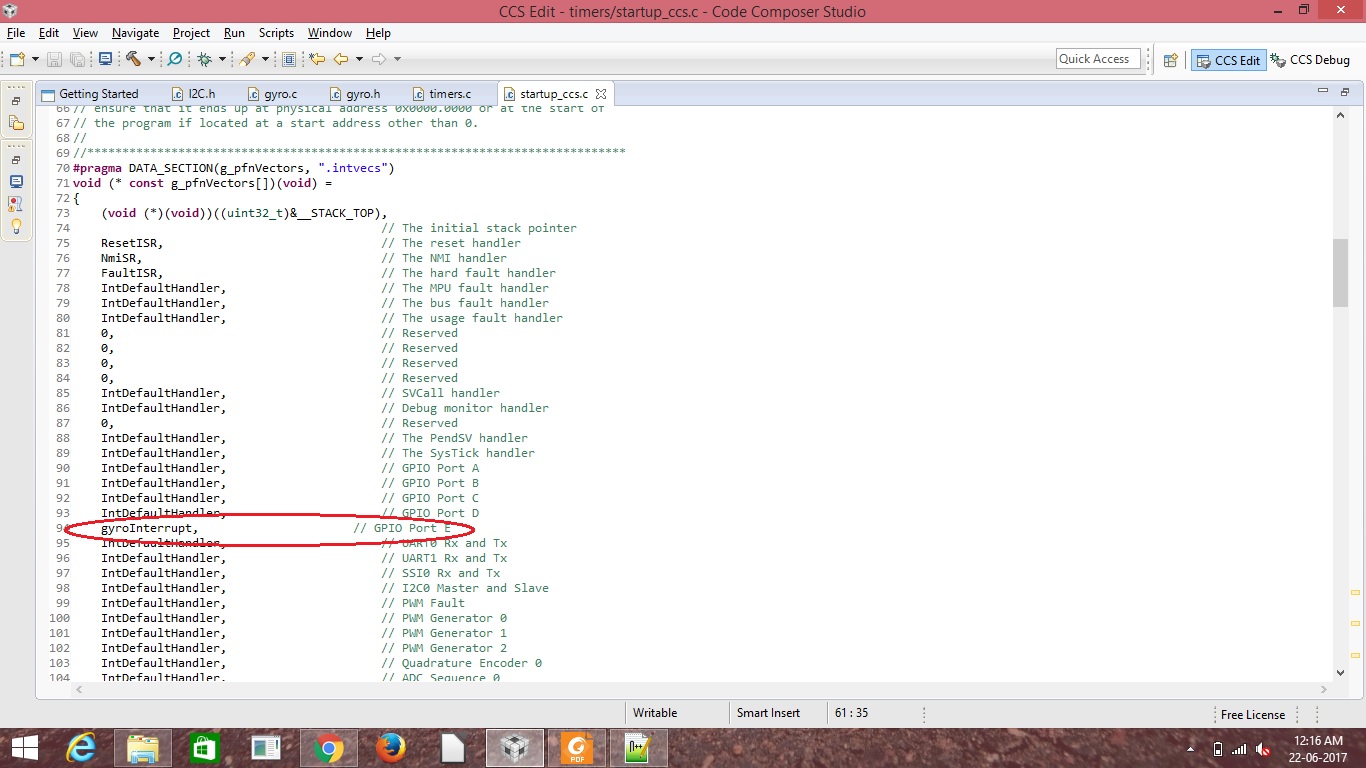
Once again thanks for all the people in the community for their support. I am facing a problem in the GPIO interrupt. I am working with the gyroscope sensor and i configured using I2C, in that i try to enable the GPIO interrupt for the reading of raw sensor data when the watermark interrupt occured then i am reading the sensor value. Here i attached the code which i am using for the interrupt
#include <stdbool.h>
#include <stdint.h>
#include <string.h>
#include <stdio.h>
#include <math.h>
#include "inc/hw_i2c.h"
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "inc/hw_types.h"
#include "driverlib/gpio.h"
#include "driverlib/fpu.h"
#include "driverlib/i2c.h"
#include "driverlib/debug.h"
#include "driverlib/pin_map.h"
#include "driverlib/sysctl.h"
#include "driverlib/rom.h"
#include "driverlib/uart.h"
#include "utils/uartstdio.h"
#include "driverlib/interrupt.h"
#include "gyro.h"
struct Sensor_Data
{
int16_t Gyro_x_raw;
int16_t Gyro_y_raw;
int16_t Gyro_z_raw;
};
struct Sensor_Data Sensor_Value = {
0,0,0 //GYROSCOPE X,Y,Z
};
static unsigned char fifolevel = 0;
static unsigned char data = 0;
static unsigned int flags = 0;
void
InitConsole(void)
{
//
// Enable GPIO port A which is used for UART0 pins.
// TODO: change this to whichever GPIO port you are using.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
//
// Configure the pin muxing for UART0 functions on port A0 and A1.
// This step is not necessary if your part does not support pin muxing.
// TODO: change this to select the port/pin you are using.
//
GPIOPinConfigure(GPIO_PA0_U0RX);
GPIOPinConfigure(GPIO_PA1_U0TX);
//
// Enable UART0 so that we can configure the clock.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
//
// Use the internal 16MHz oscillator as the UART clock source.
//
UARTClockSourceSet(UART0_BASE, UART_CLOCK_PIOSC);
//
// Select the alternate (UART) function for these pins.
// TODO: change this to select the port/pin you are using.
//
GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
//
// Initialize the UART for console I/O.
//
UARTStdioConfig(0, 115200, 16000000);
}
void i2cController2Intialise(void)
{
#if defined(TARGET_IS_TM4C129_RA0) || \
defined(TARGET_IS_TM4C129_RA1) || \
defined(TARGET_IS_TM4C129_RA2)
ui32SysClock = SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ |
SYSCTL_OSC_MAIN |
SYSCTL_USE_OSC), 25000000);
#else
SysCtlClockSet(SYSCTL_SYSDIV_4 | SYSCTL_USE_PLL | SYSCTL_OSC_MAIN | //System clock = 50MHZ
SYSCTL_XTAL_25MHZ);
/*SysCtlClockSet(SYSCTL_SYSDIV_1 | SYSCTL_USE_OSC | SYSCTL_OSC_MAIN |
SYSCTL_XTAL_16MHZ);*/
#endif
// The I2C2 peripheral must be enabled before use.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C2);
//
// For this example I2C2 is used with PortB[3:2]. The actual port and
// pins used may be different on your part, consult the data sheet for
// more information. GPIO port B needs to be enabled so these pins can
// be used.
// TODO: change this to whichever GPIO port you are using.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOE);
//
// Configure the pin muxing for I2C2 functions on port B2 and B3.
// This step is not necessary if your part does not support pin muxing.
// TODO: change this to select the port/pin you are using.
//
GPIOPinConfigure(GPIO_PE4_I2C2SCL);
GPIOPinConfigure(GPIO_PE5_I2C2SDA);
//
// Select the I2C function for these pins. This function will also
// configure the GPIO pins pins for I2C operation, setting them to
// open-drain operation with weak pull-ups. Consult the data sheet
// to see which functions are allocated per pin.
// TODO: change this to select the port/pin you are using.
//
GPIOPinTypeI2CSCL(GPIO_PORTE_BASE, GPIO_PIN_4);
GPIOPinTypeI2C(GPIO_PORTE_BASE, GPIO_PIN_5);
//
// Enable and initialize the I2C2 master module. Use the system clock for
// the I2C2 module. The last parameter sets the I2C data transfer rate.
// If false the data rate is set to 100kbps and if true the data rate will
// be set to 400kbps. For this example we will use a data rate of 100kbps.
//
#if defined(TARGET_IS_TM4C129_RA0) || \
defined(TARGET_IS_TM4C129_RA1) || \
defined(TARGET_IS_TM4C129_RA2)
I2CMasterInitExpClk(I2C2_BASE, ui32SysClock, false);
#else
I2CMasterInitExpClk(I2C2_BASE,SysCtlClockGet(), true); //system clock - 50mhz,TPR - 0x06
#endif
}
void gyroInterrupt( void )
{
L3G4200D_Register_Write( SLAVE_ADDRESS_L3G4200D, L3G4200D_FIFO_CTRL_REG, 0x4A ); //FIFO control reg : stream mode and WTM-10
L3G4200D_Register_Read( SLAVE_ADDRESS_L3G4200D, L3G4200D_FIFO_SRC_REG, &fifolevel); //FIFO status reg
UARTprintf("Interrupt occuring\n");
if( 0x80 & fifolevel )
{
flags = 1;
}
}
int main( void )
{
unsigned char deviceID = 0;
short int i = 0;
ROM_FPULazyStackingEnable();
i2cController2Intialise();
InitConsole();
//ROM_GPIOPinTypeGPIOOutput( GPIO_PORTE_BASE, GPIO_PIN_2 );
ROM_GPIOIntTypeSet( GPIO_PORTE_BASE, GPIO_PIN_2, GPIO_BOTH_EDGES );
ROM_IntEnable( INT_GPIOE );
ROM_IntMasterEnable();
L3G4200D_Register_Read( SLAVE_ADDRESS_L3G4200D, L3G4200D_WHO_AM_I, &deviceID );
UARTprintf("deviceID : 0x%x\n",deviceID);
L3G4200D_Register_Write( SLAVE_ADDRESS_L3G4200D, L3G4200D_CTRL_REG1, 0x3F ); //Control register 1 100hz and normal,all axis enabled
L3G4200D_Register_Write( SLAVE_ADDRESS_L3G4200D, L3G4200D_CTRL_REG3, 0x07 ); //Control reg 3 : WTm,empty,overrun enabled
L3G4200D_Register_Write( SLAVE_ADDRESS_L3G4200D, L3G4200D_CTRL_REG4, 0x80); //BDU 1 and 250dps
L3G4200D_Register_Write( SLAVE_ADDRESS_L3G4200D, L3G4200D_CTRL_REG5, 0x5F); //FIFO enabled and Hpen-1,INT-11,OUT-11
//L3G4200D_Register_Write( SLAVE_ADDRESS_L3G4200D, L3G4200D_FIFO_CTRL_REG, 0x4A ); //FIFO control reg : stream mode and WTM-10
while( 1 )
{
//UARTprintf("FIFOlevel : 0x%x\n",fifolevel);
#if 1
if( 1 == flags ) // Checking for the watermark interrupt
{
data = fifolevel & 0x1F;
UARTprintf("FIFOlevel : 0x%x\n",fifolevel);
for( i = 0; i < data; i = i + 1 )
{
Read_L3G4200D_RawData( &Sensor_Value.Gyro_x_raw, &Sensor_Value.Gyro_y_raw, &Sensor_Value.Gyro_z_raw );
UARTprintf("%d,%d,%d\n",Sensor_Value.Gyro_x_raw,Sensor_Value.Gyro_y_raw,Sensor_Value.Gyro_z_raw);
}
L3G4200D_Register_Write( SLAVE_ADDRESS_L3G4200D, L3G4200D_FIFO_CTRL_REG, 0x0A ); // FIFO is changed to bypass mode
flags = 0;
}
#endif
}
}
no interrupt was occuring it not going the gyroInterrupt(); function.Is there any mistake in my code,if there please correct me and provide me the solution.