Part Number: TM4C1294NCPDT
Tool/software: Code Composer Studio
Hi,
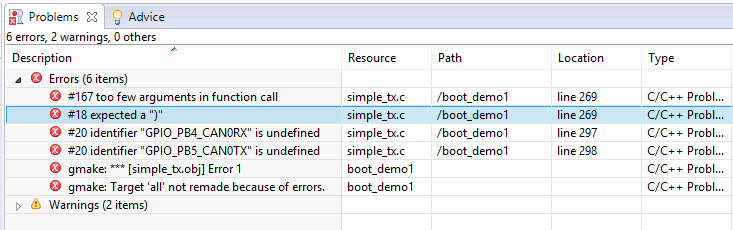
I am trying to interface CAN in TM4C1294 development board. I have found the CAN example program from the path C:\ti\TivaWare_C_Series-2.1.3.156\examples\peripherals\can. What are the configuration in project or changes to be done in program to build this program. because by copy paste I have tried it a lot and does not get build by going though the procedure in the video Code composer for beginners.