


Other Parts Discussed in Thread: DRV8801
Hello,
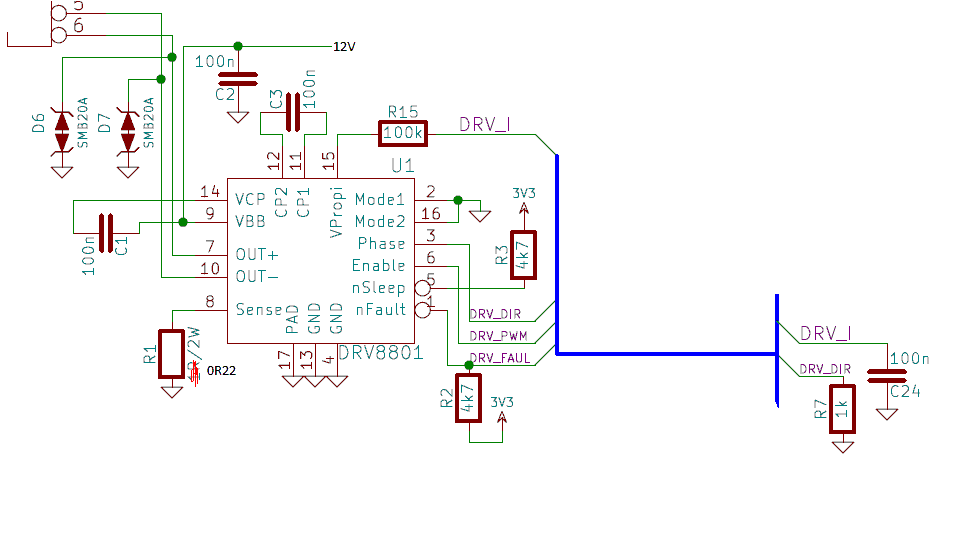
I designed a custom board with TM4C123GH6PM and 2 DRV8801's. I previously posted my design at at https://e2e.ti.com/support/microcontrollers/tiva_arm/f/908/p/633837/2343957
Basically I am powering my circuit from a 2S battery pack, 7.5 to 8.4 volts. I have to distribute the power, so I can feed both the DRV8801's and the mcu tru a switching power supply. I have to make sure no reverse voltage comes to the mcu power supply, AND if the motors drive too much momentarily, the surge will not cause a drop in the mcu's power supply.
So I designed the following circuit:
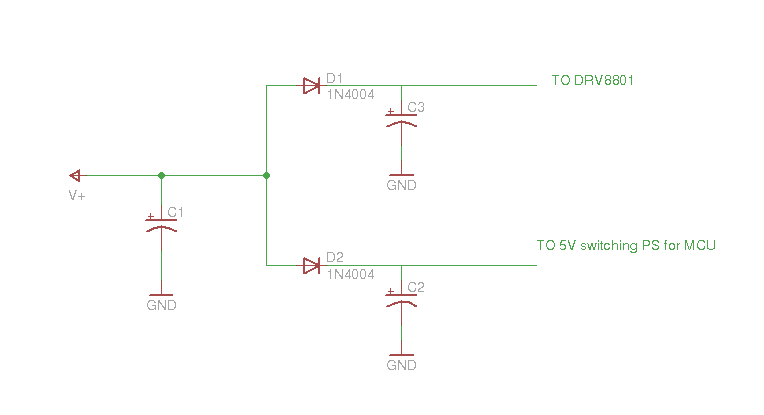
With this setup neither the motor drivers can cause backvoltage, nor it can cause a drop because of D2. Am I missing something? What kind of diodes should I be using. D1 probably needs to be able to withstand couple of amps, D2 much less, and they both need to have a low drop out voltage. The schematics marks them as 1N4004, but that is probably not the correct one.
I also wonder if I can use a 0V dropout ideal diode circuit in this scheme. The nice thing about this circuit is it has 0V drop. It is used in raspberry pi, and I got them from their github, referenced below,.
However I dont know if it can be used for this purpose, where the current and back-noise is high.
There is the diode circuit:
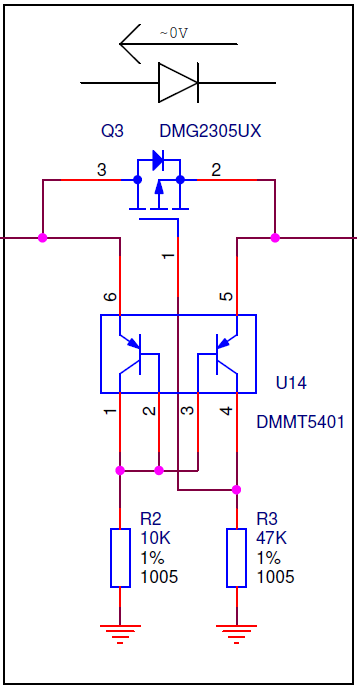
(reference: https://github.com/raspberrypi/hats/blob/master/zvd-circuit.png
Best regards,
C.



{kind=link}