


Part Number: TM4C123GH6PM
Tool/software: Code Composer Studio
Hello,
I want to have SPI clock in the range of 25 MHz using the PLL. I am using the following statements but am only getting a maximum of 10 MHz !
First I set the PLL clock frequency to insure it is more than double the required SPI clock as follows:
Setting the clocking to run at 100 MHz (200 MHz / 2) using the PLL.
SysCtlClockSet(SYSCTL_SYSDIV_2 | SYSCTL_USE_PLL | SYSCTL_OSC_MAIN | SYSCTL_XTAL_16MHZ);
Then setting the SPI clock to 20 MHz as follows:
SSIConfigSetExpClk(SSI3_BASE, SysCtlClockGet(), SSI_FRF_MOTO_MODE_0, SSI_MODE_MASTER, 20000000, 16);
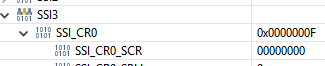
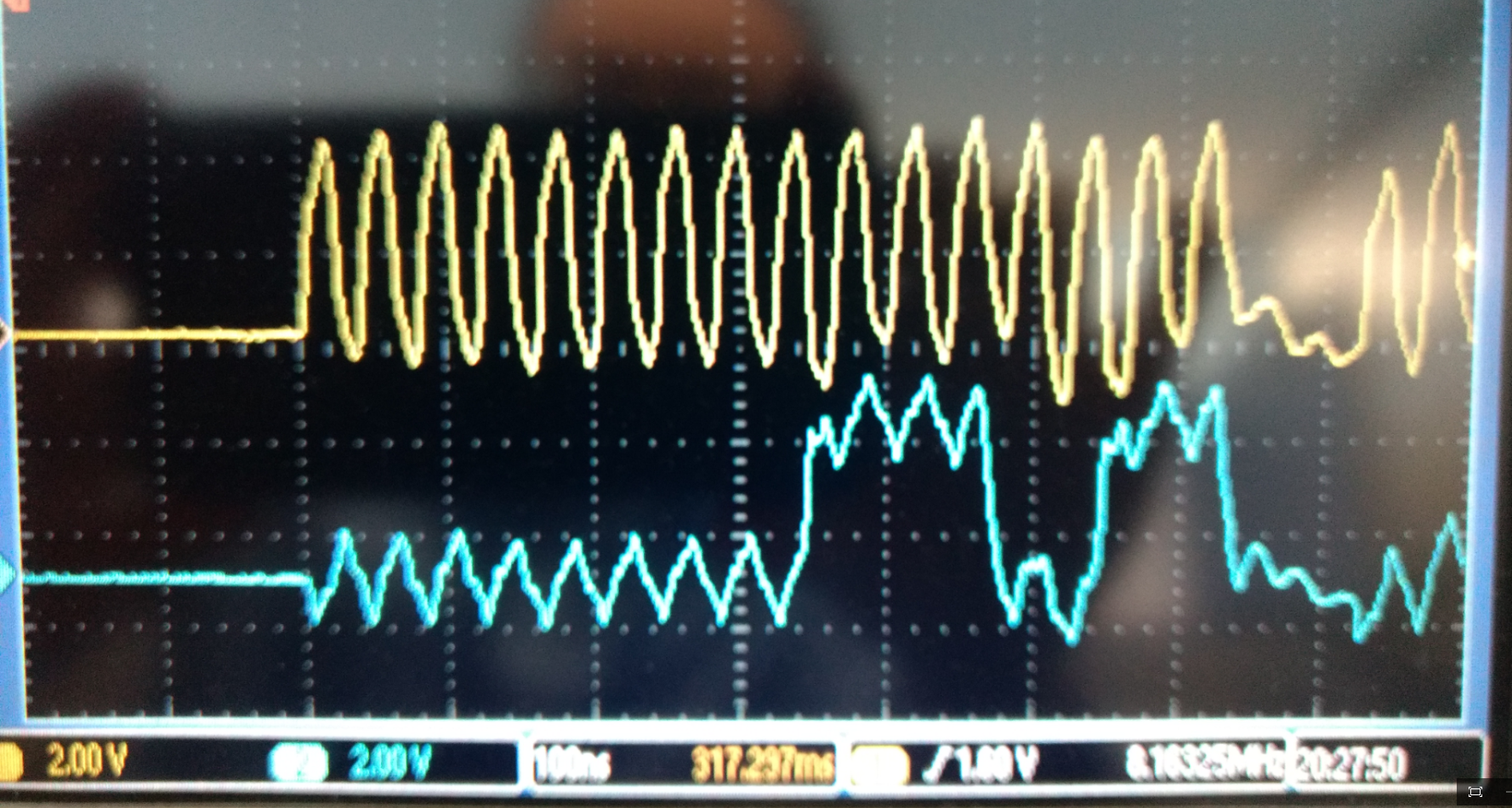
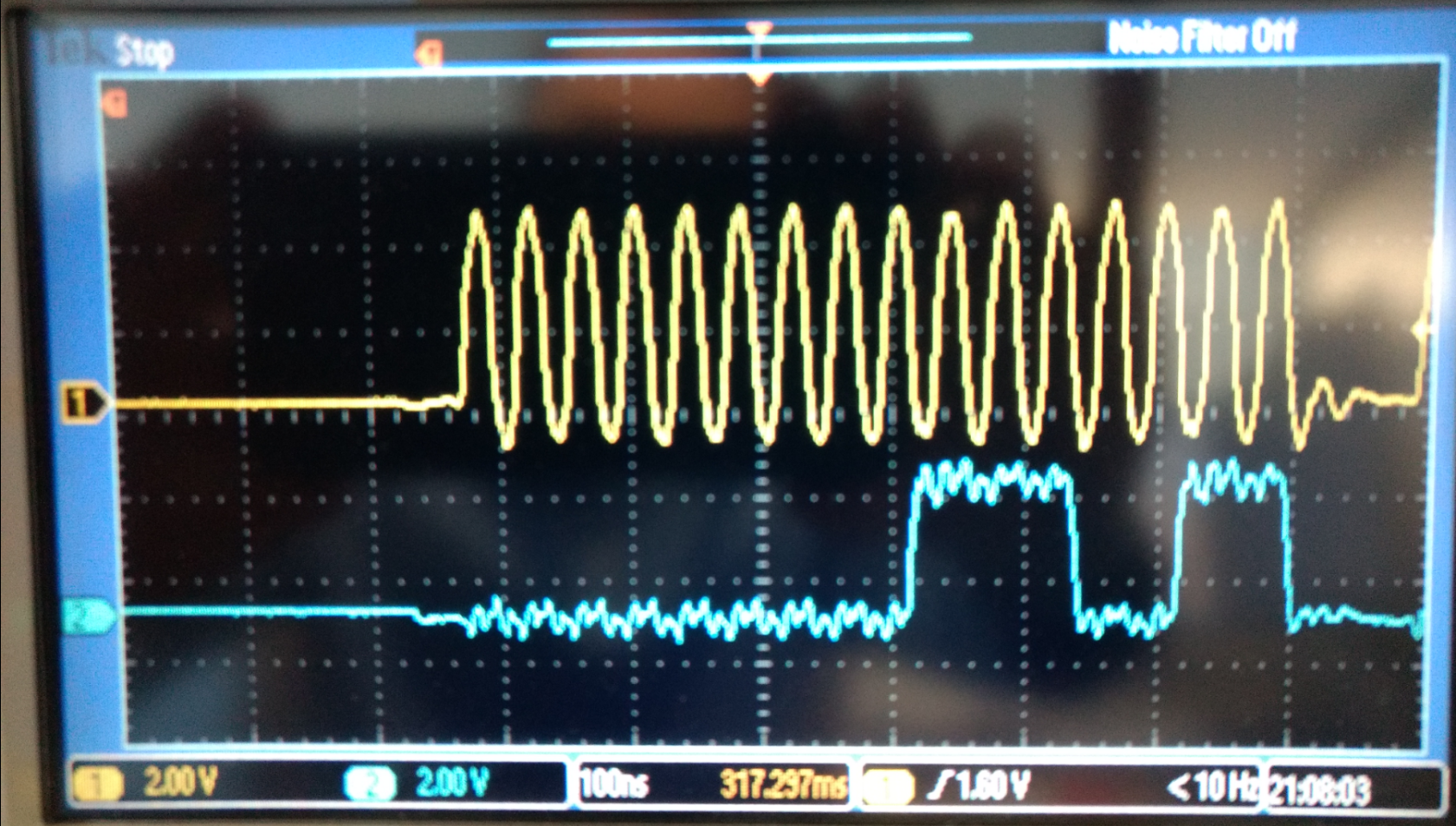
Why do I get only 10 MHz?
Thanks,
Karim





{kind=link}