Hello all,
I am trying to understand the CAN module in TM4C123 device in details to build AUTOSAR CAN driver (this is related to my graduation project).
I am wondering how can i configure all of hardware msg objects before leaving the init state of the CAN controller. for example, if i need 16 object for RX and the other 16 objects for TX.
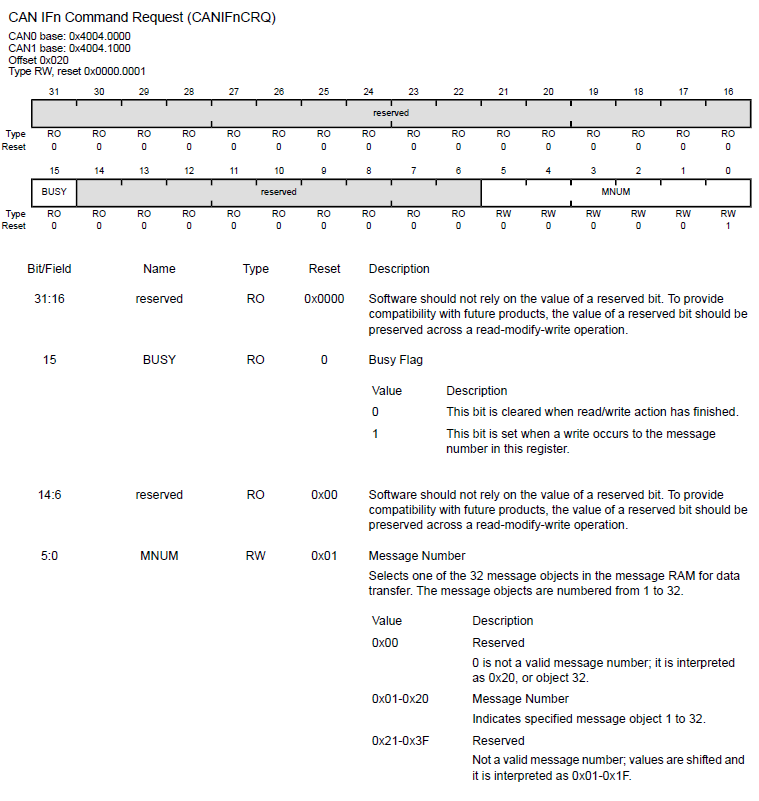
i can't understand that since i have only 2 MNUM fields (in the 2 command req. registers). how can i use unique msg. object number for each hardware msg object.
Regards,
Sarea