


Tool/software: TI-RTOS
Hi,
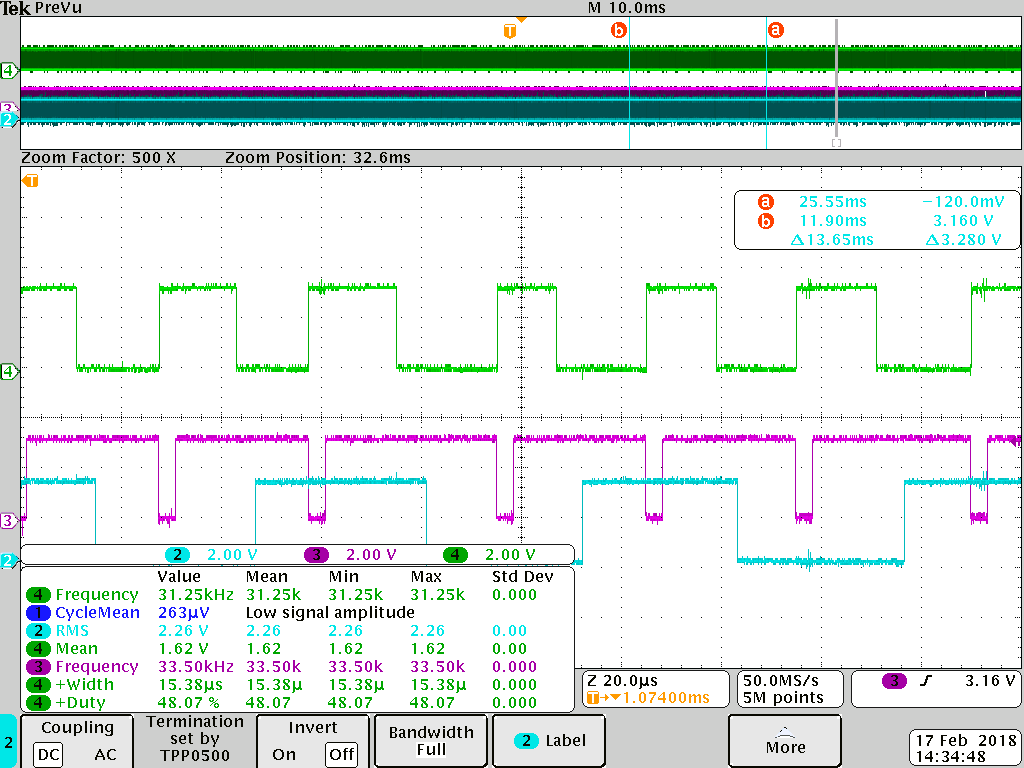
I am using MCU SPI to read from a slave device. Slave signalizes that is ready to provide the data by triggering my external interrupt. In the interrupt I post a semaphore to unlock the SPI_transmission. It was working ok when I was testing it with low bandwidth. At the end my slave triggers interrupt with 31.3kHz frequency, I need to read then 2 16bit frames. Once I operate with this frequency the delay between slave trigger signal and performing SPI task starts to be too big. In the external interrupt routine I just toggle a pin (just for reference) and post SPI semaphore. In the scope screenshot below the blue signal is a reference signal which should be toggled once code jumps to the drdy() routine, the green one is slave's trigger (falling edge is callign drdy().There is ~4us delay. The delay is even bigger when you look at the violet waveform which is one of the SPI's signal (slave enable signal).
I am using two tasks and one hwi. One task doesn't have while() loop and just runs at the begging to configure slaves(DAC_conf ()). The other task masterTaskFxn() is a SPI transmission task. I can see in the ROV that first task is terminated once it does the initialization. Then just the idle(), masterTaskFxn(), and hwi seem to be active. Is that significant delay a result of latency introduced by rtos scheduler itself or I can do better?
void hardware_init(void)
{
// SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB);
// enable Timer 2
//
// Auxilaty SPI pins
//
GPIOPinTypeGPIOOutput(GPIO_PORTB_BASE, GPIO_PIN_5); // Init PF4 as input
GPIOPinWrite(GPIO_PORTB_BASE, GPIO_PIN_5,32); // Init PF4 as input
GPIOPinTypeGPIOOutput(GPIO_PORTB_BASE, GPIO_PIN_3); // Init PF4 as input
GPIOPinWrite(GPIO_PORTB_BASE, GPIO_PIN_3,8); // Init PF4 as input
GPIOPinTypeGPIOOutput(GPIO_PORTB_BASE, GPIO_PIN_2); // Init PF4 as input
GPIOPinWrite(GPIO_PORTB_BASE, GPIO_PIN_3,4); // Init PF4 as input
}
/*
* ======== GPIO/DRDY HWI ========
*/
void drdy(unsigned int index)
//void drdy(void)
{
// Semaphore_post(TCP_semaphore);
GPIO_toggle(Board_TEST); // Init PF4 as input
Semaphore_post(SPI_semaphore);
}
/*
* ======== SPI measurement transmission task ========
*/
Void masterTaskFxn (UArg arg0, UArg arg1)
{
SPI_Handle masterSpi;
SPI_Transaction masterTransaction;
SPI_Params spiParams;
bool transferOK;
SPI_Params_init(&spiParams);
spiParams.transferMode = SPI_MODE_BLOCKING;
spiParams.transferTimeout = SPI_WAIT_FOREVER;
spiParams.transferCallbackFxn = NULL;
spiParams.mode = SPI_MASTER;
spiParams.bitRate = 10000000;
spiParams.dataSize = 16;
spiParams.frameFormat=SPI_POL1_PHA1;
Semaphore_pend(SPI_semaphore, BIOS_WAIT_FOREVER);
/* Initialize SPI handle as default master */
// masterSpi = SPI_open(0, &spiParams);
masterSpi = SPI_open(Board_SPI0, &spiParams);
masterTxBuffer2[0]=0b0001001000000000;
masterTxBuffer2[1]=0b0000000000000000;
masterTxBuffer[0]=0b00010010;
/* Enable interrupts */
GPIO_enableInt(Board_BUTTON0);
while(1)
{
Semaphore_pend(SPI_semaphore, BIOS_WAIT_FOREVER);
/* Initialize master SPI transaction structure */
ctr1=ctr1+1;
masterTransaction.count = 1; //Numbers of frames for a transaction
masterTransaction.txBuf = (Ptr)masterTxBuffer;
masterTransaction.rxBuf = (Ptr)masterRxBuffer;
/* Initiate SPI transfer */
transferOK = SPI_transfer(masterSpi, &masterTransaction);
// if(transferOK) {
// /* Print contents of master receive buffer */
// System_printf("Master: %s\n", masterRxBuffer);
// }
// else {
// System_printf("Unsuccessful master SPI transfer");
// }
}
/* Deinitialize SPI */
SPI_close(masterSpi);
System_printf("Done\n");
System_flush();
}
/*
* ======== Config task ========
*/
Void DAC_conf (UArg arg0, UArg arg1)
{
SPI_Handle masterSpi_dac;
SPI_Transaction masterTransaction_dac;
SPI_Transaction masterTransaction_s2p;
SPI_Transaction masterTransaction_adc;
SPI_Params spiParams_dac;
bool transferOK;
SPI_Params_init(&spiParams_dac);
spiParams_dac.transferMode = SPI_MODE_BLOCKING;
spiParams_dac.transferTimeout = SPI_WAIT_FOREVER;
spiParams_dac.transferCallbackFxn = NULL;
spiParams_dac.mode = SPI_MASTER;
spiParams_dac.bitRate = 5000000;
spiParams_dac.dataSize = 16;
spiParams_dac.frameFormat=SPI_POL1_PHA1;
// Semaphore_pend(SPI_semaphore_DAC, BIOS_WAIT_FOREVER);
/* Initialize SPI handle as default master */
masterSpi_dac = SPI_open(0, &spiParams_dac);
// masterSpi = SPI_open(Board_SPI0, NULL);
/* Initialize master SPI transaction structure */
masterTransaction_dac.count = 1; //Numbers of frames for a transaction
masterTransaction_dac.txBuf = (Ptr)DAC_Buffer;
masterTransaction_dac.rxBuf = (Ptr)masterRxBuffer;
GPIOPinWrite(GPIO_PORTB_BASE,GPIO_INT_PIN_5,0); // Init PF4 as input
/* Initiate SPI transfer */
transferOK = SPI_transfer(masterSpi_dac, &masterTransaction_dac);
GPIOPinWrite(GPIO_PORTB_BASE,GPIO_INT_PIN_5,32); // Init PF4 as input
DAC=1;
// Semaphore_pend(SPI_semaphore_DAC, BIOS_WAIT_FOREVER);
/* Initialize master SPI transaction structure */
masterTransaction_s2p.count = 1; //Numbers of frames for a transaction
masterTransaction_s2p.txBuf = (Ptr)S2P_Buffer;
masterTransaction_s2p.rxBuf = (Ptr)masterRxBuffer;
GPIOPinWrite(GPIO_PORTB_BASE,GPIO_INT_PIN_3,0); // Init PF4 as input
/* Initiate SPI transfer */
transferOK = SPI_transfer(masterSpi_dac, &masterTransaction_s2p);
GPIOPinWrite(GPIO_PORTB_BASE,GPIO_INT_PIN_3,8); // Init PF4 as input
DAC=2;
// Semaphore_pend(SPI_semaphore_DAC, BIOS_WAIT_FOREVER);
GPIOPinConfigure(GPIO_PD2_SSI2FSS);
GPIOPinTypeSSI(GPIO_PORTD_BASE, GPIO_PIN_0 | GPIO_PIN_1 |
GPIO_PIN_2 | GPIO_PIN_3);
masterTxBuffer[0]=0b0100000100000001;
/* Initialize master SPI transaction structure */
masterTransaction_adc.count = 1; //Numbers of frames for a transaction
masterTransaction_adc.txBuf = (Ptr)masterTxBuffer;
masterTransaction_adc.rxBuf = (Ptr)masterRxBuffer;
transferOK = SPI_transfer(masterSpi_dac, &masterTransaction_adc);
DAC=3;
// Semaphore_pend(SPI_semaphore_DAC, BIOS_WAIT_FOREVER);
masterTxBuffer[0]=0b00001000;
/* Initialize master SPI transaction structure */
masterTransaction_adc.count = 1; //Numbers of frames for a transaction
masterTransaction_adc.txBuf = (Ptr)masterTxBuffer;
masterTransaction_adc.rxBuf = (Ptr)masterRxBuffer;
transferOK = SPI_transfer(masterSpi_dac, &masterTransaction_adc);
DAC=4;
/* Deinitialize SPI */
SPI_close(masterSpi_dac);
/* Open new SPI onnection that will send the measurements in a loop */
Semaphore_post(SPI_semaphore);
/* Enable interrupts */
GPIO_enableInt(Board_BUTTON0);
// GPIOIntEnable(GPIO_PORTB_BASE, GPIO_PIN_4);
if(transferOK) {
/* Print contents of master receive buffer */
System_printf("Configuration done \n");
}
else {
System_printf("Unsuccessful master SPI transfer");
}
System_flush();
}
/*
* ======== main ========
*/
int main(void)
{
/* Construct BIOS objects */
Task_Params taskParams2;
Task_Params taskParams3;
/* Call board init functions */
Board_initGeneral();
Board_initGPIO();
Board_initSPI();
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD);
GPIOPinTypeGPIOOutput(GPIO_PORTD_BASE, GPIO_PIN_2); // Init PF4 as input
GPIOPinWrite(GPIO_PORTD_BASE, GPIO_PIN_2,4); // Init PF4 as input
hardware_init();
/* install Button callback */
GPIO_setCallback(Board_BUTTON0, drdy);
// /* Enable interrupts */
// GPIO_enableInt(Board_BUTTON0);
/* Construct master threads */
Task_Params_init(&taskParams2);
taskParams2.priority = 2;
taskParams2.stackSize = TASKSTACKSIZE;
taskParams2.stack = &task0Stack;
Task_construct(&task0Struct, (Task_FuncPtr)masterTaskFxn, &taskParams2, NULL);
/* Construct master DAC Task threads */
Task_Params_init(&taskParams3);
taskParams3.priority = 1;
taskParams3.stackSize = TASKSTACKSIZE;
taskParams3.stack = &task1Stack;
Task_construct(&task1Struct, (Task_FuncPtr)DAC_conf, &taskParams3, NULL);
/* Start BIOS */
BIOS_start();
return (0);
}



