Greetings ! I am thankful for this community Forum.
Issue - Behavior of RXFE bit of UART Flag Register when FIFO is disabled
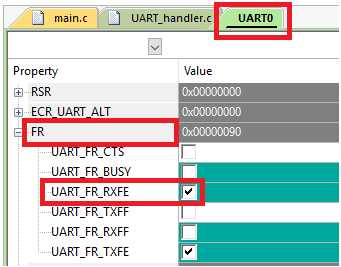
Scenario - UART0 is used with FIFO disabled. A byte of data is sent using a terminal application running on PC to the Tiva Board over UART. I see that the RXFE (Receive FIFO Empty) bit of
the UART FR(Flag Register) is 1 even on reception of the 1 byte data sent via terminal application; thus I am unable to read using UARTCharGetNonBlocking(). The datasheet says -
If the FIFOs are disabled, the empty and full flags are set according to the status of the 1-byte-deep holding registers.
Thus, I am expecting this Flag bit to be 0 once the data is received.
Also, As the datasheet mentions -
Both FIFOs are accessed via the UART Data (UARTDR) register.
I am able to access the byte received by directly reading the UART data register instead.
I have 2 questions here -
1. Why RXFE indicates that the UART Receive holding register is EMPTY even when I am able to read the received byte by directly accessing the UART data register ?
2. The datasheet mentions the following about the UART Data Register -
Important: This register is read-sensitive.
What does read sensitive means here ?
/*** main.c ***/
#include <stdint.h>
#include <stdbool.h>
#include <cmsis_os.h>
#include "driverlib/sysctl.h"
#include "driverlib/rom.h"
#include "UART_handler.h"
void controllerInit();
int main()
{
controllerInit();
UART0_init();
while(1);
}
void controllerInit()
{
// Set the controller Clock
ROM_SysCtlClockSet(SYSCTL_SYSDIV_1 | SYSCTL_USE_OSC | SYSCTL_OSC_MAIN | SYSCTL_XTAL_16MHZ);
}
/*** UART_handler.c ***/
#include "UART_handler.h"
// UART0 Interrupt Service Routine
void UART0_ISR()
{
volatile uint32_t ui32Status, ui32ReceivedData=0;
volatile uint8_t ui8RxData = 0;
ui32Status = ROM_UARTIntStatus(UART0_BASE, true);
UARTIntClear(UART0_BASE,ui32Status);
switch(ui32Status)
{
case UART_INT_RX:
{
if(UARTCharsAvail(UART0_BASE))
ui8RxData = UARTCharGetNonBlocking(UART0_BASE);
else
ui8RxData = UART0->DR;
}
break;
}
}
void UART0_init()
{
// UART Peripheral Enable
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
// GPIO enable which contains UART pins
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
// Master interrupt enable
ROM_IntMasterEnable();
// COnfigure UART Rx pin
GPIOPinConfigure(GPIO_PA0_U0RX);
// COnfigure UART Tx pin
GPIOPinConfigure(GPIO_PA1_U0TX);
// Configure UART pins
ROM_GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
// Configure UART clock
ROM_UARTConfigSetExpClk(UART0_BASE, ROM_SysCtlClockGet(), 115200,
(UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE |
UART_CONFIG_PAR_NONE));
// Disable the FIFO
UARTFIFODisable(UART0_BASE);
// Enable UART interrupt
ROM_IntEnable(INT_UART0);
// Enable UART Rx interrupt
ROM_UARTIntEnable(UART0_BASE, UART_INT_RX);
}
/*** UART_handler.h ***/ #ifndef __UART_HANDLER__ #define __UART_HANDLER__ #include <stdint.h> #include <stdbool.h> #include "inc/hw_ints.h" #include "inc/hw_memmap.h" #include "driverlib/debug.h" #include "driverlib/fpu.h" #include "driverlib/gpio.h" #include "driverlib/interrupt.h" #include "driverlib/pin_map.h" #include "driverlib/rom.h" #include "driverlib/sysctl.h" #include "driverlib/uart.h" #include "TM4C123GH6PM.h" void UART0_init(); #endif