Part Number: SW-EK-TM4C129EXL
Tool/software: TI-RTOS
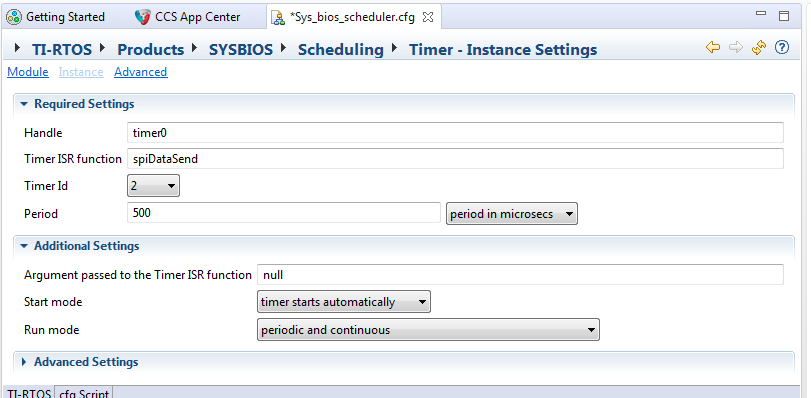
I need to send data for every 0.5 ms through SPI protocol. I had configured timer stattically for 0.5 milliseconds and added the code for sending data via SPI, in ISR of the Timer configured, still it's not working. This is the code
/* XDCtools Header files */
#include <xdc/std.h>
#include <xdc/runtime/System.h>
#include <xdc/cfg/global.h>
/* BIOS Header files */
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Task.h>
/* TI-RTOS Header files */
#include <ti/drivers/GPIO.h>
#include <ti/drivers/SPI.h>
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Semaphore.h>
#include <ti/sysbios/family/arm/m3/Hwi.h>
/* Board Header file */
#include "Board.h"
#include "driverlib/gpio.h"
#include <inc/hw_memmap.h>
#include <inc/hw_types.h>
#include <inc/hw_ssi.h>
#include <driverlib/ssi.h>
#include <driverlib/udma.h>
#include <driverlib/sysctl.h>
#include "driverlib/timer.h"
#include <ti/sysbios/hal/Timer.h>
UChar array[8] = {0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF};
UChar receiveBuffer[8];
UChar transmitBuffer[8];
void spiDataSend()
{
int l;
for (l = 0; l < 8; l++)
{
transmitBuffer[l] = array[l];
}
int i;
SPI_Handle spi;
SPI_Params spiParams;
SPI_Params_init(&spiParams);
spiParams.dataSize = 8; /* dataSize can range from 4 to 8 bits */
spiParams.transferMode = SPI_MODE_BLOCKING;
spiParams.mode = SPI_MASTER;
spiParams.transferCallbackFxn = NULL;
spi = SPI_open(Board_SPI0, &spiParams);
if (spi == NULL) {
/* Error opening SPI */
}
SPI_Transaction spiTransaction;
Bool transferOK;
spiTransaction.count = 8;
spiTransaction.txBuf = transmitBuffer;
spiTransaction.rxBuf = receiveBuffer;
transferOK = SPI_transfer(spi, &spiTransaction);
if (transferOK) {
/* Error in SPI transfer or transfer is already in progress */
System_printf("SPI Transfer is successful \n");
System_flush();
}
System_printf("transmitBuffer is : \n");
System_flush();
for (i = 0; i < 8; i++)
{
System_printf(" %x ",transmitBuffer[i]);
}
System_printf("\n");
System_flush();
SPI_close(spi);
}
void hw_init()
{
Board_initGeneral();
Board_initGPIO();
Board_initSPI();
}
/*
* ======== main ========
*/
int main(void)
{
hw_init();
/* Start BIOS */
BIOS_start();
return (0);
}