Part Number: TM4C129XNCZAD
Other Parts Discussed in Thread: EK-TM4C1294XL, UNIFLASH
Tool/software: TI-RTOS
Hi,
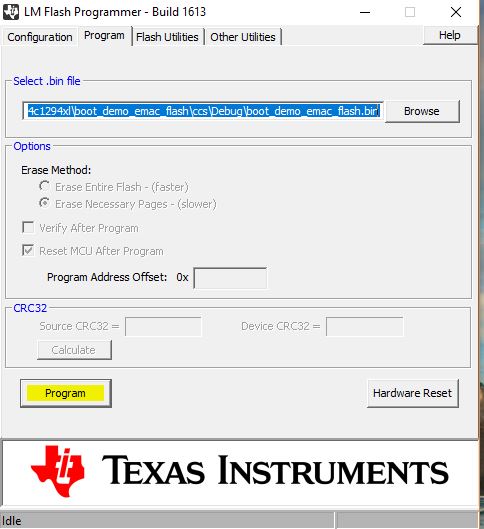
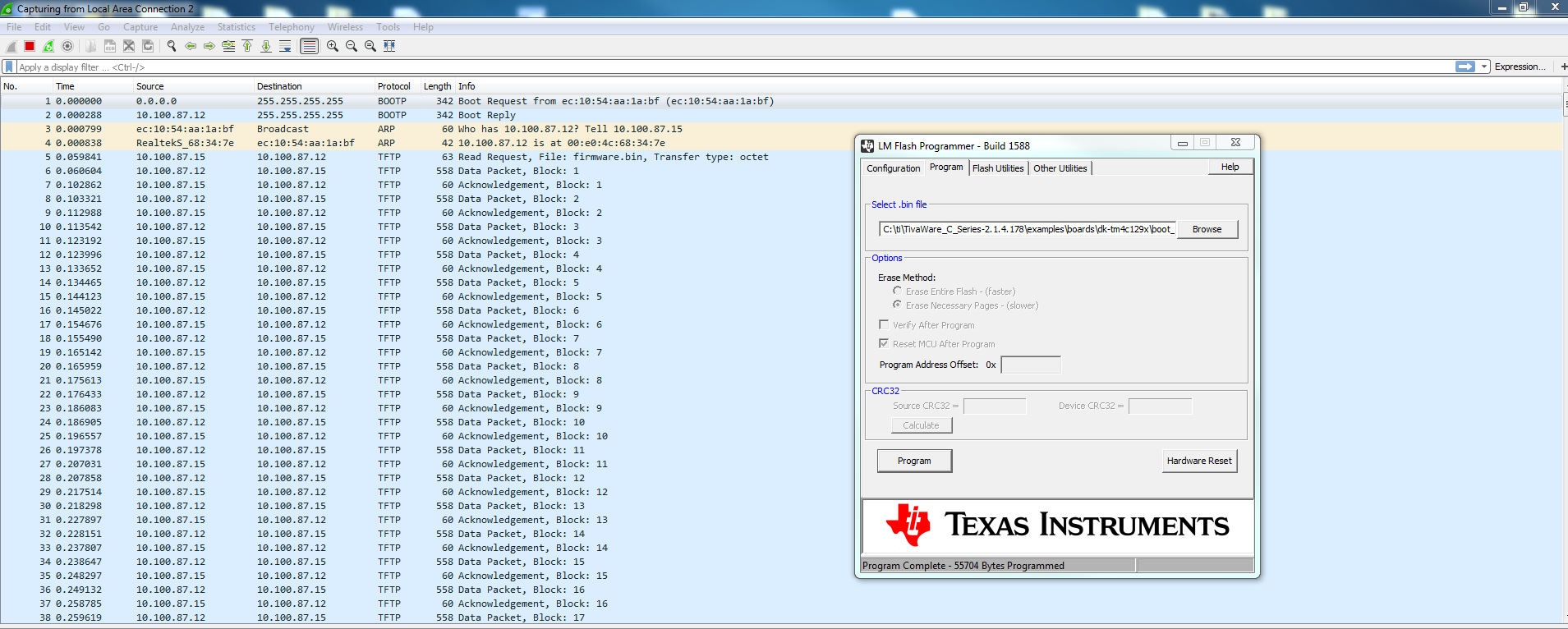
In our project, it is needed to update embedded software of the board by means of network. Is it possible or any references about this issue? It is wanted to update ".bin" file remotely.
Thanks for your answers.
Best Regards,
Cengizhan YAPICIOĞLU