Part Number: DK-TM4C129X
Tool/software: TI C/C++ Compiler
Hello,
Iam using DK-TM4C129X (Tiva Launch Pad) and my program works fine in normal conditions, but I have to push the 'reset' button on the Launch Pad every time power is disconnected and reconnected. Because the interrupts seems not to work when power is reconnected. but the main() routine seems to continue without the interrupts.
I am using tivaware_c_series_2_1_4_178.
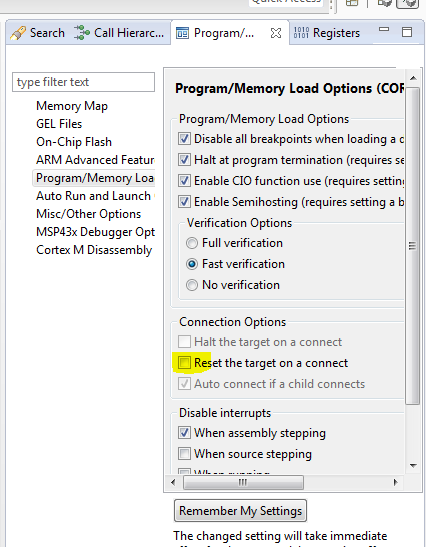
I'd like to know the actual function of the 'reset' button on the Pad and is there a soft reset function which I can use in the main routine to enable the interrupts on power reset.
(
i have tried
HWREG(NVIC_APINT) = NVIC_APINT_VECTKEY | NVIC_APINT_SYSRESETREQ;
SysCtlReset();
IntMasterEnable();
Seems to have no effect
)
How can I fix this?
Thanks in advance.