

Part Number: TM4C123GH6PM
Tool/software: Code Composer Studio
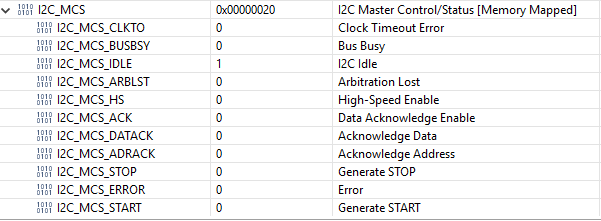
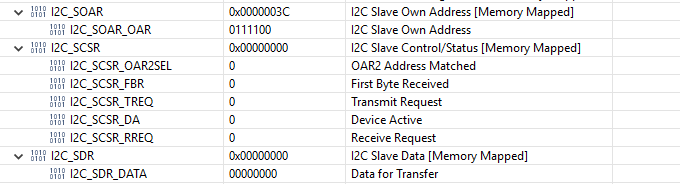
i have problem that all configuration is done except I2CMDR and I2CMCS are not modified even Iam writing to them
there Screenshots for all registers


This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
Part Number: TM4C123GH6PM
Tool/software: Code Composer Studio
i have problem that all configuration is done except I2CMDR and I2CMCS are not modified even Iam writing to them
there Screenshots for all registers

no Iam writing my own drivers from zero
I wrote GPIO TIMERS UART drivers ad they are working properly
an there is I2c.c
/*
* ICC.c
*
* Created on: Oct 30, 2018
* Author: Morgan
*/
#include"ICC.h"
gICCError_t initAppropriateICCPins(sICC_t ICC)
{
gICCError_t state=ICC_PASS;
if(ICC==ICC0_MOD)
{
//PB2 PB3
clockGatingICC(ICC0_MOD);
clockGating(GPIOB);
pinAlternateFunctionSel(BASE_B, 2, HIGH);
pinAlternateFunctionSel(BASE_B, 3, HIGH);
pinDigitalEnable(BASE_B, 2, HIGH);
pinDigitalEnable(BASE_B, 3, HIGH);
GPIOPinControl(BASE_B, 2, 3);
GPIOPinControl(BASE_B, 3, 3);
pinOpenDrainEnable(BASE_B, 3, TRUE);
}else if(ICC==ICC1_MOD)
{
//PA6 PA7
clockGatingICC(ICC1_MOD);
clockGating(GPIOA);
pinAlternateFunctionSel(BASE_A, 6, HIGH);
pinAlternateFunctionSel(BASE_A, 7, HIGH);
pinDigitalEnable(BASE_A, 6, HIGH);
pinDigitalEnable(BASE_A, 7, HIGH);
GPIOPinControl(BASE_A, 6, 3);
GPIOPinControl(BASE_A, 7, 3);
pinOpenDrainEnable(BASE_A, 7, TRUE);
}else if(ICC==ICC2_MOD)
{
//PE4 PE5
clockGatingICC(ICC2_MOD);
clockGating(GPIOE);
pinAlternateFunctionSel(BASE_E, 4, HIGH);
pinAlternateFunctionSel(BASE_E, 5, HIGH);
GPIOPinControl(BASE_E, 4, 3);
GPIOPinControl(BASE_E, 5, 3);
pinOpenDrainEnable(BASE_E, 5, TRUE);
}else if(ICC==ICC3_MOD)
{
//PD0 PD1
clockGatingICC(ICC3_MOD);
clockGating(GPIOD);
pinAlternateFunctionSel(BASE_D, 0, HIGH);
pinAlternateFunctionSel(BASE_D, 1, HIGH);
GPIOPinControl(BASE_D, 0, 3);
GPIOPinControl(BASE_D, 1, 3);
pinOpenDrainEnable(BASE_D, 1, TRUE);
}else
state=ICC_MODULE_NOT_EXIST;
return state ;
}
gICCError_t initMaster(uint32 icc)
{
gICCError_t state = ICC_PASS ;
if((icc==ICC0)||(icc==ICC1)||(icc==ICC2)||(icc==ICC3))
{
HW_WRITE_BIT(icc+I2CMCR, 4, HIGH);
}else
state=ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t setSCLclock(uint32 icc,gICC_CLOCK_t speed,uint8 sysclockinMHZ)
{
uint8 temp =0;
gICCError_t state=ICC_PASS;
if((icc==ICC0)||(icc==ICC1)||(icc==ICC2)||(icc==ICC3))
{
if(speed==STANDARD_MODE)
{
if(sysclockinMHZ==2||sysclockinMHZ==4||sysclockinMHZ==8||
sysclockinMHZ==16||sysclockinMHZ==20||sysclockinMHZ==40||
sysclockinMHZ==80)
{
temp= (sysclockinMHZ/2)-1;
HW_WRITE_REG_32BIT(icc+I2CMTPR,temp);
}else
state=WRONG_SYS_CLOCK;
}else if(speed==HIGHSPEED_MODE)
{
if(sysclockinMHZ==40)
{
HW_WRITE_REG_32BIT(icc+I2CMTPR,1);
}else if(sysclockinMHZ==80)
{
HW_WRITE_REG_32BIT(icc+I2CMTPR,3);
}else
state=WRONG_SYS_CLOCK;
}else
state=WRONG_SPEED_MODE;
}else
state=ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t setMasterSlaveAddress(uint32 icc , uint8 slave)
{
gICCError_t state= ICC_PASS;
if((icc==ICC0)||(icc==ICC1)||(icc==ICC2)||(icc==ICC3))
{
HW_WRITE_MASKED_REG(icc+I2CMSA,slave,1,0xFE);
}else
state=ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t selectOperation(uint32 icc,gICC_OPERATION_t operation)
{
gICCError_t state = ICC_PASS;
if ((icc == ICC0) || (icc == ICC1) || (icc == ICC2) || (icc == ICC3))
{
if(operation==TRANSMIT)
{
HW_WRITE_BIT(icc+I2CMSA, 0, 0);
}else if(operation==RECIEVE)
{
HW_WRITE_BIT(icc+I2CMSA, 0, 1);
}else
state=WRONG_ICC_OPERATION;
}
else
state = ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t readI2CErrorBit(uint32 icc,uint8 *error)
{
gICCError_t state = ICC_PASS;
if ((icc == ICC0) || (icc == ICC1) || (icc == ICC2) || (icc == ICC3))
{
*error=HW_READ_BIT(icc+I2CMCS, 1);
}else
state=ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t readI2CBusyBit(uint32 icc,uint8 *busy)
{
gICCError_t state = ICC_PASS;
if ((icc == ICC0) || (icc == ICC1) || (icc == ICC2) || (icc == ICC3))
{
*busy=HW_READ_BIT(icc+I2CMCS, 0);
}else
state=ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t writeByte(uint32 icc,uint8 data,uint8 START,uint8 RUN,uint8 STOP)
{
gICCError_t state = ICC_PASS;
uint8 busy=0;
uint8 error;
if ((icc == ICC0) || (icc == ICC1) || (icc == ICC2) || (icc == ICC3))
{
HW_WRITE_REG_32BIT(icc+I2CMDR,data);
HW_WRITE_BIT(icc+I2CMCS, 0, RUN);
HW_WRITE_BIT(icc+I2CMCS, 1, START);
HW_WRITE_BIT(icc+I2CMCS, 2, STOP);
readI2CBusyBit(icc, &busy);
while(busy!=0);
readI2CErrorBit(icc, &error);
if(error==1)
{
HW_WRITE_BIT(icc+I2CMCS, 2, STOP);
UARTprintf("error sending over i2c");
}
}else
state = ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t MasterReadByte(uint32 icc,uint8 *data,uint8 START,uint8 RUN,uint8 STOP)
{
gICCError_t state = ICC_PASS;
uint8 busy=0;
uint8 error;
if ((icc == ICC0) || (icc == ICC1) || (icc == ICC2) || (icc == ICC3))
{
HW_WRITE_BIT(icc+I2CMCS, 0, RUN);
HW_WRITE_BIT(icc+I2CMCS, 1, START);
HW_WRITE_BIT(icc+I2CMCS, 2, STOP);
if(STOP==0)
{
HW_WRITE_BIT(icc+I2CMCS, 3, 1);
}else if(STOP==1)
{
HW_WRITE_BIT(icc+I2CMCS, 2, 0);
}
readI2CBusyBit(icc, &busy);
while(busy!=0);
readI2CErrorBit(icc, &error);
if(error==0)
{
*data = HW_READ_MASKED_BYTE_REG(icc+I2CMDR, 0, 0xFF);
}else
{
HW_WRITE_BIT(icc + I2CMCS, 2, STOP);
UARTprintf("error sending over i2c");
}
}else
state = ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t ICCenableLoopBack(uint32 icc)
{
gICCError_t state = ICC_PASS ;
if((icc==ICC0)||(icc==ICC1)||(icc==ICC2)||(icc==ICC3))
{
HW_WRITE_BIT(icc+I2CMCR, 0, HIGH);
}else
state=ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t ICCInitSlave(uint32 icc,uint8 slaveAddress)
{
gICCError_t state = ICC_PASS ;
if((icc==ICC0)||(icc==ICC1)||(icc==ICC2)||(icc==ICC3))
{
HW_WRITE_BIT(icc+I2CMCR, 5, HIGH);
HW_WRITE_BIT(icc+I2CSCSR, 0, HIGH);
HW_WRITE_MASKED_REG(icc+I2CSOAR, slaveAddress, 0, 0x7F);
}else
state=ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t slaveRecievedData(uint32 icc,uint8 *status)
{
gICCError_t state = ICC_PASS;
if ((icc == ICC0) || (icc == ICC1) || (icc == ICC2) || (icc == ICC3))
{
*status=HW_READ_BIT(icc+I2CSCSR, 0);
}else
state=ICC_MODULE_NOT_EXIST;
return state;
}
gICCError_t slaveReadByte(uint32 icc,uint8 *data)
{
gICCError_t state = ICC_PASS ;
uint8 status;
slaveRecievedData(icc, status);
if((icc==ICC0)||(icc==ICC1)||(icc==ICC2)||(icc==ICC3))
{
while(status!=0);
*data = HW_READ_MASKED_BYTE_REG(icc+I2CSDR, 0, 0xFF);
}else
state=ICC_MODULE_NOT_EXIST;
return state;
}
___________________________________________________________________________ and in main iam using loopback mode to test i2c
iam very sorry about formatting my first time to post here
___________________________________________________________________________________________________
/**
* main.c
*/
#include <stdbool.h>
#include <stdint.h>
#include"App/app_gpio.h"
#include"HAL/timers.h"
#include"APP/app_uart.h"
#include"HAL/can.h"
#include"HAL/ICC.h"
int main(void)
{
uint8 TXdata [2] ;
uint8 RXdata [2] ;
uint8 index ;
const uint8 slave=0x3C;
setSysClock(INTERNAL_16M, c20MHZ);
gGPIOObj_t inPin ;
gUARTCFG_t UARTobj;
UARTobj.FIFOsEnable=FALSE;
UARTobj.clockSource=SYSTEM_CLOCK;
UARTobj.parityEnable=FALSE;
UARTobj.stopBits=ONE_STOP_BIT;
UARTobj.wordLength=EIGHT_BITS;
UARTobj.integarDiv=130;
UARTobj.fractionaldiv=13;
UARTobj.uart=UART0_MODULE;
inPin.base=BASE_F;
inPin.dir=INPUT;
inPin.pin_num=0;
inPin.configPadObj.resType=PULL_UP_RES;
inPin.configPadObj.lockFlag=FALSE;
inPin.configPadObj.currentVal=CURRENT_2MA;
initPort(&inPin,0b11101110);
initUART(&UARTobj);
//I2c Init
initAppropriateICCPins(ICC1_MOD);
initMaster(ICC1);
setSCLclock(ICC1, STANDARD_MODE, 20);
ICCenableLoopBack(ICC1);
ICCInitSlave(ICC1, slave);
setMasterSlaveAddress(ICC1, slave);
selectOperation(ICC1, TRANSMIT);
TXdata[0]='I';
TXdata[1]='2';
TXdata[2]='C';
for (index = 0; index <= 2; index++)
{
RXdata[index] = 0;
}
for (index = 0; index <= 2; index++)
{
UARTprintf("Sending ... %c\n\r",TXdata[index]);
writeByte(ICC1, TXdata[index], 1, 1, 1);
slaveReadByte(ICC1, &RXdata[index]);
UARTprintf("Recieved ... %c\n\r",RXdata[index]);
}
return 0;
}
