Part Number: TM4C123GH6PM
Tool/software: Code Composer Studio
Hello all,
How to implement SPI Communication using two TM4c123gh6pm boards (one as master and other as slave) on a single PC?
I have configured one Tm4c123gh6m board as master and other board as slave and written two c++ script using code composer studio.
i successfully transferred 10 bytes of data [1,2,3,4,5,6,7,8,9,10] from the master end and received at the slave side.
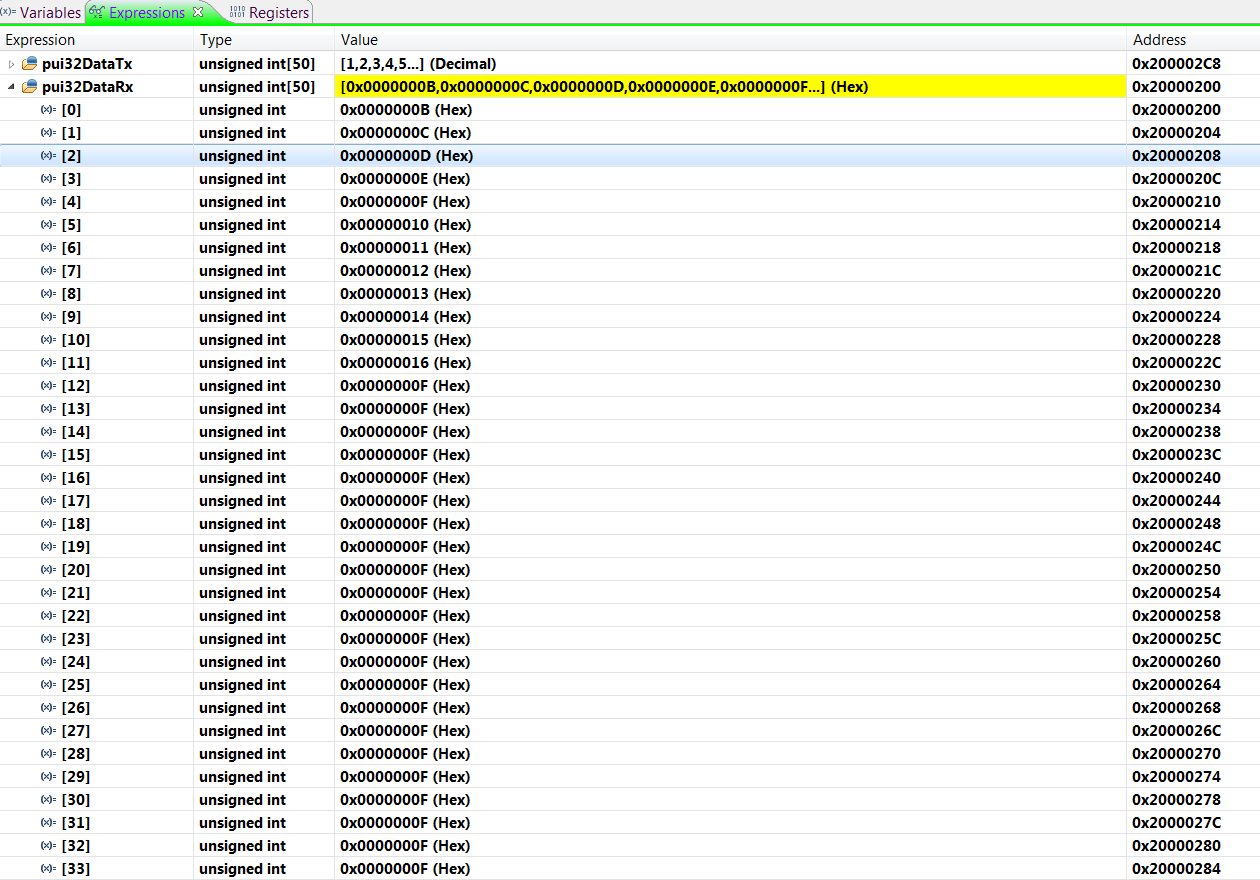
After that i am sending 10 byte of data [11,12,13,14,15,16,17,18,19,20] from slave then i am getting following 10 bytes of data at master side
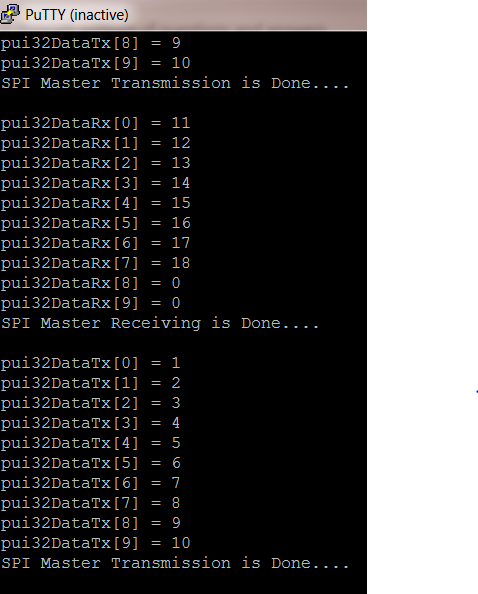
[11,12,13,14,15,16,17,18,0,0]. I am using PUTTY to monitor master and slave data using two serial windows on single PC.
I am unable to receiving last two bytes of data properly at master side.
Here is my PUTTY serial windows

Please help me if anyone knows. It would great appreciation if you help others.