


Part Number: TMS570LS0432
Other Parts Discussed in Thread: HALCOGEN
Hello,
I hope you can help me with the CAN interface problem I have.
I'm using Halcogen for creating the example shown there, CAN1 sending "HERCULES" and CAN2 receiving it. All the steps have been followed but it seems like there is no transmision in the CAN bus.
Connections in the launchpad are:
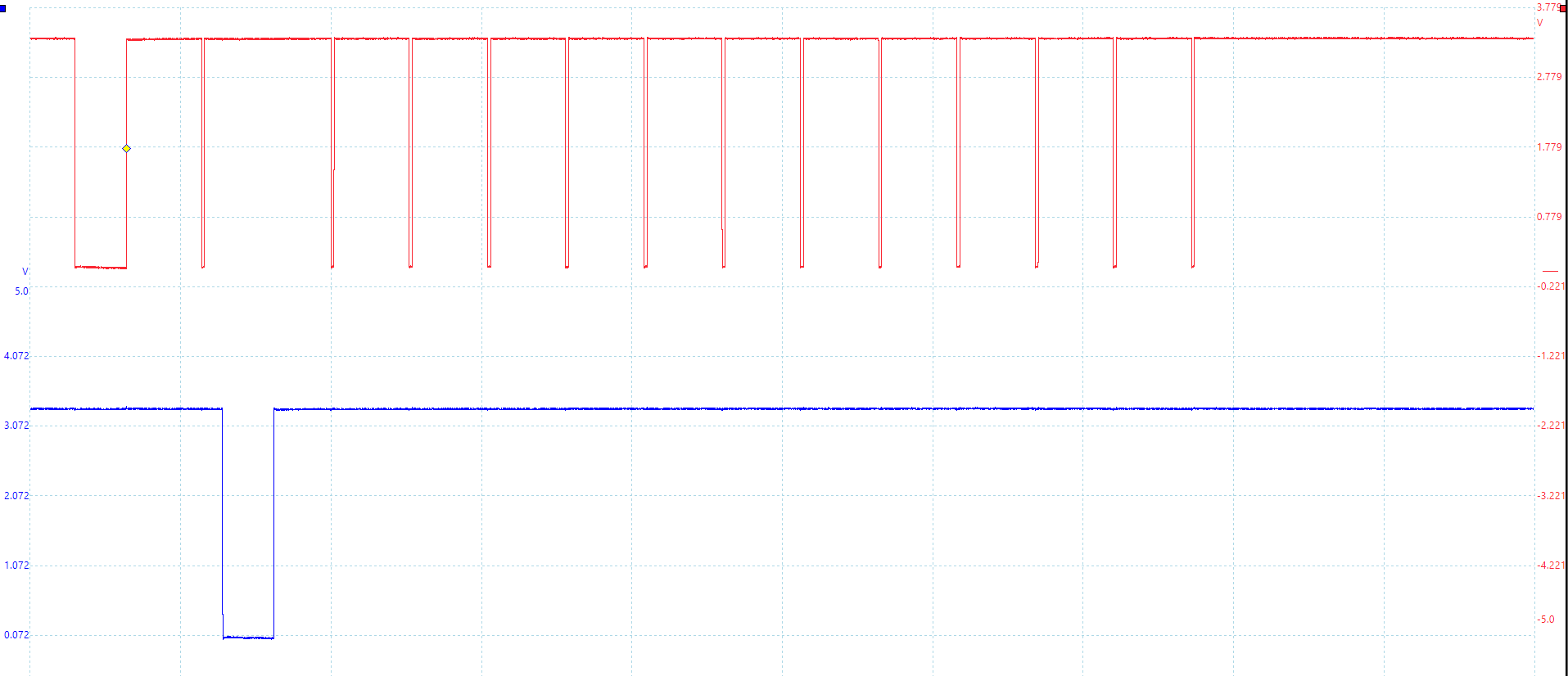
Red oscilloscope signal : CAN_TX1 -> CAN_RX2
Blue oscilloscope signal: CAN_RX1 <- CAN_TX2
Probing CAN_TX1 with an oscilloscope, it shows that no data is sent, only the Init portion but no real data.
Data registers of the values to be sent are correct:
If1DatA = 0x43524548
If1DatB = 0x53454C55
But the programs stays waiting for CAN2 to receive anything, here:
while(!canIsRxMessageArrived(canREG2, canMESSAGE_BOX1));
TrReq1 is 0x00000001 so I think it should sent over the CAN (??) ... but it isn't!
As mentioned, the oscilloscope only shows the initialization from CAN1, so CAN2 is waiting for something to be received. Could you please indicate where is the problem?
Code is here:
Regards,
Pere
