Part Number: EK-TM4C123GXL
Tool/software: Code Composer Studio
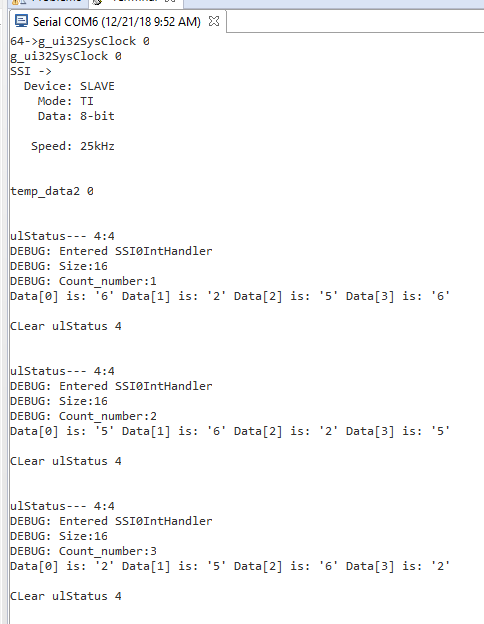
Hi, I am trying to use my EK-TM4C123GXL launch pad as a SSI/SPI slave device. I have tried some sample code based on an online resource which is using SSI0 Interrupts. When I tried sending data from my master (a Linux based platform) device to the launchpad, the SSI0IntHandler is not triggered and I am not seeing any received data.
I wonder if my code using interrupts to receive data is correct. Or there is a much simpler way to view the received data (I dont mind using the polling method) with sample code.
Note: My master is working fine as I am able to receive the data from it without any issues using an aardvark device as a slave. I have commented out sendTxSSI() in my code.
#include <stdbool.h>
#include <stdint.h>
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "inc/hw_nvic.h"
#include "driverlib/gpio.h"
#include "driverlib/pin_map.h"
#include "driverlib/ssi.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "utils/uartstdio.h"
#include "driverlib/timer.h"
//*****************************************************************************
//
//! \addtogroup ssi_examples_list
//! <h1>TI Master (ti_master)</h1>
//!
//! This example shows how to configure the SSI0 as TI Master. The code will
//! send three characters on the master Tx then poll the receive FIFO until
//! 3 characters are received on the master Rx.
//!
//! This example uses the following peripherals and I/O signals. You must
//! review these and change as needed for your own board:
//! - SSI0 peripheral
//! - GPIO Port A peripheral (for SSI0 pins)
//! - SSI0Clk - PA2
//! - SSI0Fss - PA3
//! - SSI0Rx - PA4
//! - SSI0Tx - PA5
//!
//! The following UART signals are configured only for displaying console
//! messages for this example. These are not required for operation of I2C0.
//! - UART0 peripheral
//! - GPIO Port A peripheral (for UART0 pins)
//! - UART0RX - PA0
//! - UART0TX - PA1
//!
//! This example uses the following interrupt handlers. To use this example
//! in your own application you must add these interrupt handlers to your
//! vector table.
//! - None.
//
//*****************************************************************************
//*****************************************************************************
//
// Number of bytes to send and receive.
//
//*****************************************************************************
#define NUM_SSI_DATA 3
uint32_t g_ui32SysClock;
uint32_t g_ulDataRx1[4],g_ulDataRx2;
uint8_t g_ulSSI2RXTO;
uint8_t flag =0;
uint8_t temp_data = 0;
uint32_t Count = 0;
uint8_t Send_flag = 0;
volatile uint32_t millis = 0;
uint32_t g_uc_timer = 0;
uint32_t ulStatus = 0;
/*
Interrupt handler for the timer
*/
void SysTickInt(void)
{
uint32_t status=0;
status = TimerIntStatus(TIMER5_BASE,true);
TimerIntClear(TIMER5_BASE,status);
millis++;
}
void
SSI0IntHandler(void)
{
//
// Read interrupt status.
//
ulStatus = SSIIntStatus(SSI0_BASE, 1);
//
// Check the reason for the interrupt.
//
// if(ulStatus & SSI_RXFF)
UARTprintf("\n\nulStatus--- %x:%x\n",ulStatus,ulStatus & SSI_RXFF);
// if(ulStatus & SSI_RXTO)
if(ulStatus & SSI_RXFF)
{
//
// Interrupt is because of RX time out. So increment counter to tell
// main loop that RX timeout interrupt occurred.
//
//
// Read NUM_SSI_DATA bytes of data from SSI2 RX FIFO.
//
// SSIDataGet(SSI0_BASE, &g_ulDataRx1[0]);
// SSIDataPut(SSI0_BASE, 0x1111);//Dummy Write
//sendTxSSI();
while(!SSIDataGetNonBlocking(SSI0_BASE, &g_ulDataRx1[0]))
{
}
while(!SSIDataGetNonBlocking(SSI0_BASE, &g_ulDataRx1[1]))
{
}
while(!SSIDataGetNonBlocking(SSI0_BASE, &g_ulDataRx1[2]))
{
}
while(!SSIDataGetNonBlocking(SSI0_BASE, &g_ulDataRx1[3]))
{
}
g_ulSSI2RXTO = 1;
//temp_data-=2;
//SSIDataGet(SSI0_BASE, &g_ulDataRx2);
}
//
// Clear interrupts.
//
UARTprintf("\n\nCLear ulStatus %x\n",ulStatus);
SSIIntClear(SSI0_BASE, ulStatus);
//SSIIntClear(SSI0_BASE, SSI_RXFF);
}
//*****************************************************************************
//
// This function sets up UART0 to be used for a console to display information
// as the example is running.
//
//*****************************************************************************
void
InitConsole(void)
{
//
// Enable GPIO port A which is used for UART0 pins.
// TODO: change this to whichever GPIO port you are using.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
//
// Configure the pin muxing for UART0 functions on port A0 and A1.
// This step is not necessary if your part does not support pin muxing.
// TODO: change this to select the port/pin you are using.
//
GPIOPinConfigure(GPIO_PA0_U0RX);
GPIOPinConfigure(GPIO_PA1_U0TX);
//
// Enable UART0 so that we can configure the clock.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0);
//
// Use the internal 16MHz oscillator as the UART clock source.
//
UARTClockSourceSet(UART0_BASE, UART_CLOCK_PIOSC);
//
// Select the alternate (UART) function for these pins.
// TODO: change this to select the port/pin you are using.
//
GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
//
// Initialize the UART for console I/O.
//
UARTStdioConfig(0, 115200, 16000000);
}
/*
Timer setup
*/
void TimerBegin(){
//We set the load value so the timer interrupts each 1ms
uint32_t Period;
// Period = 80000; //1ms
// Period = 833;//10us
// Period = 100;//2.5us
Period = 1190;//us
SysCtlPeripheralEnable(SYSCTL_PERIPH_TIMER5);
SysCtlDelay(3);
/*
Configure the timer as periodic, by omission it's in count down mode.
It counts from the load value to 0 and then resets back to the load value.
REMEMBER: You need to configure the timer before setting the load and match
*/
TimerConfigure(TIMER5_BASE, TIMER_CFG_PERIODIC);
TimerLoadSet(TIMER5_BASE, TIMER_A, Period -1);
TimerIntRegister(TIMER5_BASE, TIMER_A, SysTickInt);
/*
Enable the timeout interrupt. In count down mode it's when the timer reaches
0 and resets back to load. In count up mode it's when the timer reaches load
and resets back to 0.
*/
TimerIntEnable(TIMER5_BASE, TIMER_TIMA_TIMEOUT);
TimerEnable(TIMER5_BASE, TIMER_A);
}
/*
This is the delay function.
*/
void Wait (uint32_t tempo) {
volatile uint32_t temp = millis;
while ( (millis-temp) < tempo);
}
void sendTxSSI()
{
uint32_t ulDataTx;
uint32_t ulDataRx;
uint32_t ulDataTx1 =0;
ulDataTx = 0x8001;
ulDataTx1 = 0x7FFC;
//if(flag == 0)
//{
if (SSIDataPutNonBlocking(SSI0_BASE,0x1111) != 0 ) // puts a data at SSI transmit FIFO
{
UARTprintf("\nTX:%x\n\r", ulDataTx);
}
if (SSIDataPutNonBlocking(SSI0_BASE,ulDataTx) != 0 )
{
UARTprintf("\nTX:%x\n\r", ulDataTx);
}
//Wait until SSI0 is done transferring all the data in the transmit FIFO.
// while( SSIBusy(SSI0_BASE) )
// { ; }
// }
ulDataTx++;
if ( SSIDataPutNonBlocking(SSI0_BASE, ulDataTx) != 0 )
{
UARTprintf("TX:%x\n\r", ulDataTx);
}
// while( SSIBusy(SSI0_BASE) )
// { ; }
// }
if ( SSIDataPutNonBlocking(SSI0_BASE, ulDataTx1) != 0 )
{
UARTprintf("TX:%x\n\r", ulDataTx1);
}
// while( SSIBusy(SSI0_BASE) )
// { ; }
// }
ulDataTx1++;
if ( SSIDataPutNonBlocking(SSI0_BASE, ulDataTx1) != 0 )
{
UARTprintf("TX:%x\n\r", ulDataTx1);
temp_data ++;
UARTprintf("\ntemp_data1 %d\n",temp_data);
}
// while( SSIBusy(SSI0_BASE) )
// { ; }
}
//*****************************************************************************
//
// Configure SSI0 in master TI mode. This example will send out 3 bytes of
// data, then wait for 3 bytes of data to come in. This will all be done using
// the polling method.
//
//*****************************************************************************
int
main(void)
{
//
// Set the clocking to run directly from the external crystal/oscillator.
// TODO: The SYSCTL_XTAL_ value must be changed to match the value of the
// crystal on your board.
//
g_ui32SysClock = SysCtlClockFreqSet((SYSCTL_OSC_INT | SYSCTL_USE_PLL | SYSCTL_CFG_VCO_480),120000000);
//
// Set up the serial console to use for displaying messages. This is
// just for this example program and is not needed for SSI operation.
//
InitConsole();
UARTprintf("64->g_ui32SysClock %d\n",g_ui32SysClock);
UARTprintf("g_ui32SysClock %d\n",g_ui32SysClock);
//
// Display the setup on the console.
//
UARTprintf("SSI ->\n");
UARTprintf(" Device: SLAVE\n");
UARTprintf(" Mode: TI\n");
UARTprintf(" Data: 8-bit\n\n");
UARTprintf(" Speed: 25kHz\n\n");
TimerBegin();
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOF);
SysCtlDelay(3);
//Set the pin of your choise to output
GPIOPinTypeGPIOOutput(GPIO_PORTF_BASE, GPIO_PIN_1);
//
// The SSI0 peripheral must be enabled for use.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI0);
//
// For this example SSI0 is used with PortA[5:2]. The actual port and
// pins used may be different on your part, consult the data sheet for
// more information. GPIO port A needs to be enabled so these pins can
// be used.
// TODO: change this to whichever GPIO port you are using.
//
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
//
// Configure the pin muxing for SSI0 functions on port A2, A3, A4, and A5.
// This step is not necessary if your part does not support pin muxing.
// TODO: change this to select the port/pin you are using.
//
GPIOPinConfigure(GPIO_PA2_SSI0CLK);
GPIOPinConfigure(GPIO_PA3_SSI0FSS);
GPIOPinConfigure(GPIO_PA4_SSI0RX);
GPIOPinConfigure(GPIO_PA5_SSI0TX);
//
// Configure the GPIO settings for the SSI pins. This function also gives
// control of these pins to the SSI hardware. Consult the data sheet to
// see which functions are allocated per pin.
// The pins are assigned as follows:
// PA5 - SSI0Tx
// PA4 - SSI0Rx
// PA3 - SSI0Fss
// PA2 - SSI0CLK
// TODO: change this to select the port/pin you are using.
//
GPIOPinTypeSSI(GPIO_PORTA_BASE, GPIO_PIN_5 | GPIO_PIN_4 | GPIO_PIN_3 |
GPIO_PIN_2);
//
// Configure and enable the SSI port for SPI master mode. Use SSI0,
// system clock supply, idle clock level low and active low clock in
// freescale SPI mode, master mode, 1MHz SSI frequency, and 8-bit data.
// For SPI mode, you can set the polarity of the SSI clock when the SSI
// unit is idle. You can also configure what clock edge you want to
// capture data on. Please reference the datasheet for more information on
// the different SPI modes.
//
#if defined(TARGET_IS_TM4C129_RA0) || \
defined(TARGET_IS_TM4C129_RA1) || \
defined(TARGET_IS_TM4C129_RA2)
SSIConfigSetExpClk(SSI0_BASE, ui32SysClock, SSI_FRF_MOTO_MODE_0,
SSI_MODE_SLAVE, 25000, 8);
#else
SSIConfigSetExpClk(SSI0_BASE, SysCtlClockGet(), SSI_FRF_MOTO_MODE_0,
SSI_MODE_SLAVE, 25000, 8);
#endif
//
// Enable the SSI0 module.
//
SSIEnable(SSI0_BASE);
SSIIntEnable(SSI0_BASE, SSI_RXFF);
// SSIIntDisable(SSI0_BASE, SSI_TXFF);
SSIIntDisable(SSI0_BASE, SSI_TXEOT);
SSIIntDisable(SSI0_BASE, SSI_RXTO);
SSIIntDisable(SSI0_BASE, SSI_RXOR);
SSIIntClear(SSI0_BASE, SSI_RXFF);
// SSIIntClear(SSI0_BASE, SSI_TXFF);
// SSIIntClear(SSI0_BASE, SSI_RXTO);
//SSIIntClear(SSI0_BASE, SSI_RXOR);
//
// Read any residual data from the SSI port. This makes sure the receive
// FIFOs are empty, so we don't read any unwanted junk. This is done here
// because the TI SSI mode is full-duplex, which allows you to send and
// receive at the same time. The SSIDataGetNonBlocking function returns
// "true" when data was returned, and "false" when no data was returned.
// The "non-blocking" function checks if there is any data in the receive
// FIFO and does not "hang" if there isn't.
//
while(SSIDataGetNonBlocking(SSI0_BASE, &g_ulDataRx1[0]))
{
}
//
// Initialize the data to send.
//
IntEnable(INT_SSI0);
g_uc_timer = millis;
UARTprintf("\ntemp_data2 %d\n",temp_data);
while(1){
//UARTprintf("\n1.temp_data %d\n",temp_data);
if(g_ulSSI2RXTO != 0){
UARTprintf("\ng_ulSSI2RXTO %d Count %d\n",g_ulSSI2RXTO,Count);
g_ulSSI2RXTO = 0;
Count++;
UARTprintf("\nRX.%x\n\r", g_ulDataRx1[0]);
UARTprintf("RX.%x\n\r", g_ulDataRx1[1]);
UARTprintf("RX.%x\n\r", g_ulDataRx1[2]);
UARTprintf("RX.%x\n\r", g_ulDataRx1[3]);
//UARTprintf("\nSEND DATA BACK TO MASTER\n");
//sendTxSSI();
}
}
return(0);
}