Part Number: TM4C123GE6PM
Other Parts Discussed in Thread: EK-TM4C123GXL
Tool/software: Code Composer Studio
Hello,
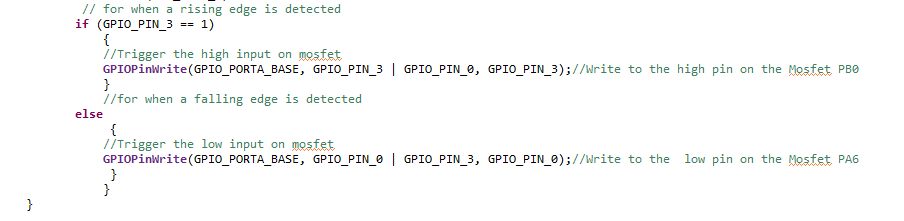
I am currently trying to use interrupts to detect a rising edge from a function generator input using the Tiva C TM4C123G launchpad.
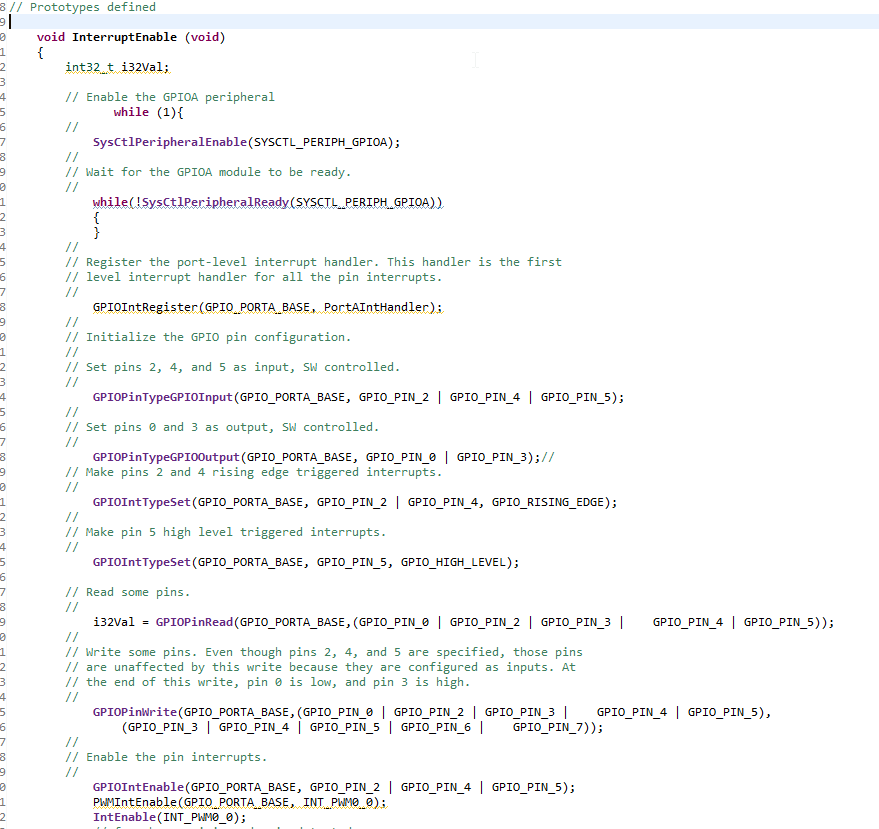
As of right now, I am calling the interrupt function below to carry out an interrupt. While debugging the program gets stuck in the interrupt.c file, is this normal?
Additionally, I am not even sure if this is the correct way to call/use an interrupt. Most of the code I have produced is based on sample code, therefore any help is greatly appreciated.
Here is the interrupt function I am calling.....