Part Number: TM4C129ENCPDT
Hi,
I am trying to toggle a GPIO Pin and it seems to be extremely slow.
My ucontroller main clock is at 120MHz.
I deleted the in-between delay but still it is ver slow.
Here is how my clock is configured. I have verified the clock is at 120MHz by reading uint32_t sys_clock.
// Initialize system clock to 120 MHz
// uint32_t sys_clock;
sys_clock = ROM_SysCtlClockFreqSet(
(SYSCTL_XTAL_25MHZ | SYSCTL_OSC_MAIN |
SYSCTL_USE_PLL | SYSCTL_CFG_VCO_480),
SYSTEM_CLOCK);
ASSERT(sys_clock == SYSTEM_CLOCK);
And the code for toggling the Pins;
void adc_conv_start (void)
{
GPIOPinWrite(ADC_CTRL1_PORT,ADC_CNVSTARTA |ADC_CNVSTARTB ,0);
//for(i=0;i<1;i++){}
//SysCtlDelay(1);
GPIOPinWrite(ADC_CTRL1_PORT, ADC_CNVSTARTA | ADC_CNVSTARTB, ADC_CNVSTARTA | ADC_CNVSTARTB);
}
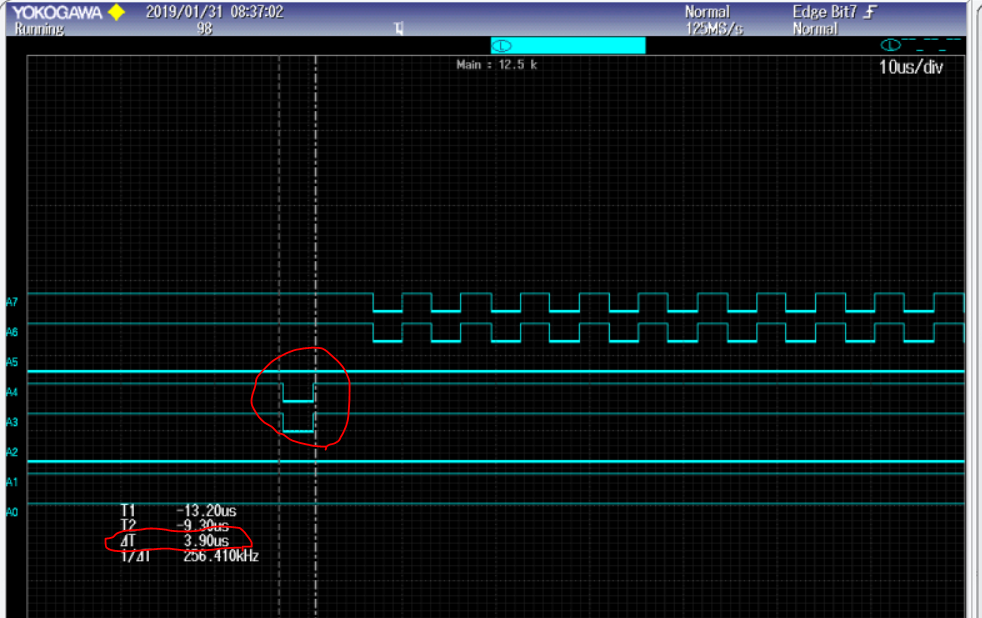
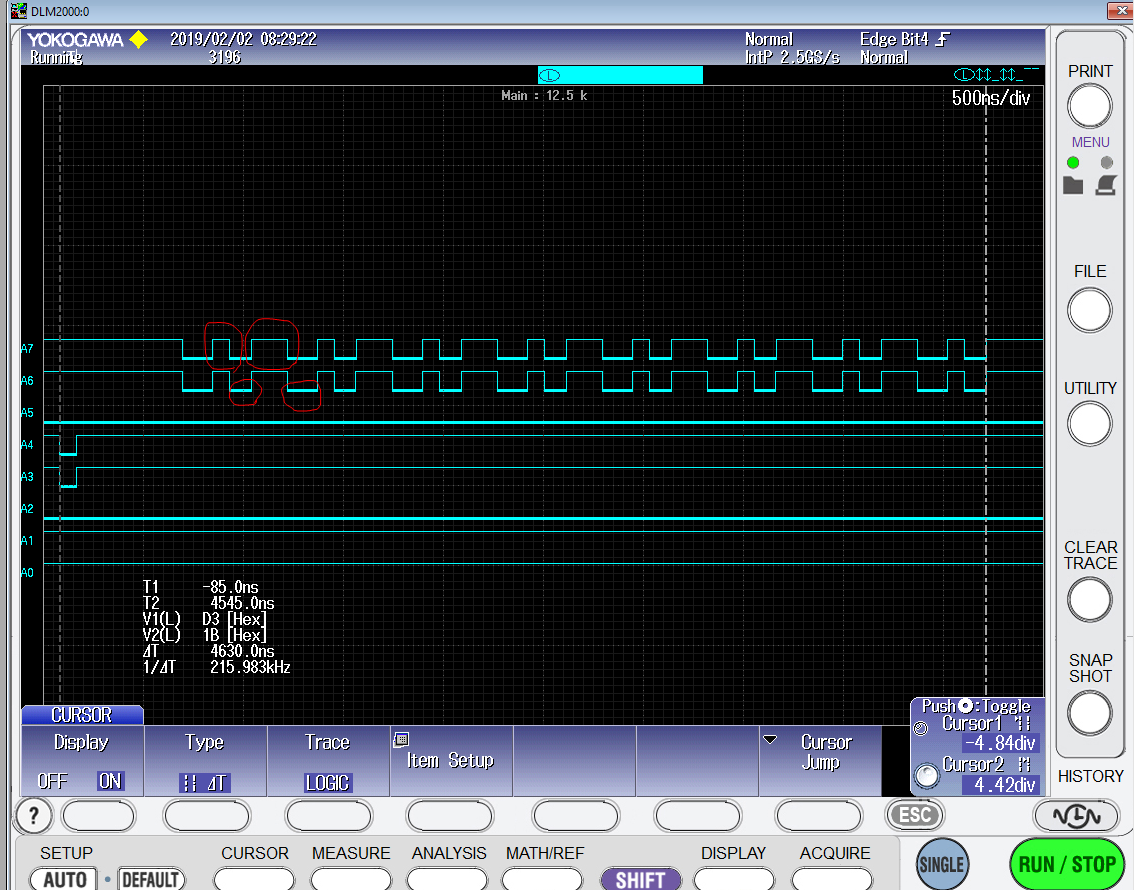
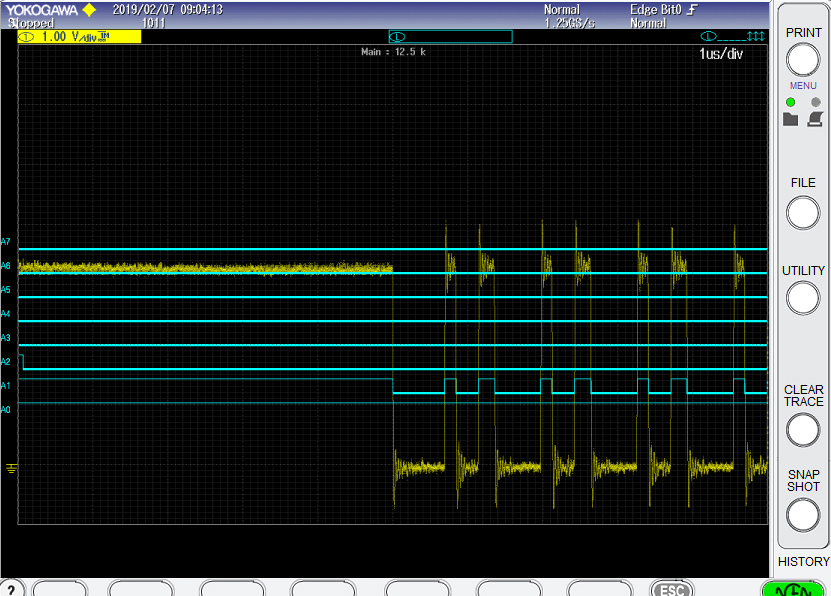
And here is the snapshot from the scope showing a delay of 3.9 usec.