Part Number: TM4C1294NCPDT
Other Parts Discussed in Thread: EK-TM4C1294XL
Tool/software: Code Composer Studio
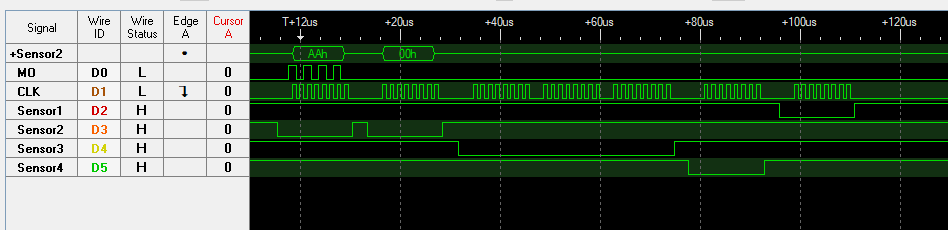
I have a TM4C129 which has sensors that I am trying to read from. I cannot read any other pins than the ones I used below in the code. In the code below, I am keep reading from temp. sensor. I do not need to write anything to MOSI. All I am trying to do is clocking and reading from the sensor.
But I cannot get the reading for some reason. Not sure what I am missing in the code. I have checked other examples (ti_master.c etc) There is nothing different than my code. Any idea what am I missing?
Thanks.
uint32_t ui32SysClock = SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ |
SYSCTL_OSC_MAIN |
SYSCTL_USE_OSC), 25000000);
void init_sensor(void)
{
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI0);
while (!SysCtlPeripheralReady(SYSCTL_PERIPH_SSI0))
;
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
while (!SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOA))
;
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOH);
while (!SysCtlPeripheralReady(SYSCTL_PERIPH_GPIOH))
;
GPIOPinTypeGPIOOutput(GPIO_PORTH_BASE, GPIO_PIN_0); // CS as output
GPIOPinTypeGPIOOutput(GPIO_PORTA_BASE, GPIO_PIN_2); // CLK as output
GPIOPinTypeGPIOInput(GPIO_PORTA_BASE, GPIO_PIN_5); // MISO as output
GPIOPinConfigure(GPIO_PA2_SSI0CLK); //CLK
GPIOPinConfigure(GPIO_PA5_SSI0XDAT1); //MISO
GPIOPinTypeSSI(GPIO_PORTA_BASE,
GPIO_PIN_5 | GPIO_PIN_2);
SSIConfigSetExpClk(SSI0_BASE, ui32SysClock, SSI_FRF_MOTO_MODE_3,
SSI_MODE_MASTER,
1000000, 8);
SSIEnable(SSI0_BASE);
}
void read_sensor(void){
while (SSIBusy(SSI0_BASE))
;
SSIDataGet(SSI0_BASE, &dataRx[0]);
}
int main(void)
{
while(1){
read_sensor();
}
}