


Tool/software: Code Composer Studio
Hi all,
I am facing with a hard fault interrupt.
I use two interrupts in my program, UART 1 RX interrupt and UART 3 Interrupt. My program runs correctly in approximately 1 minutes and after that, it is halted.
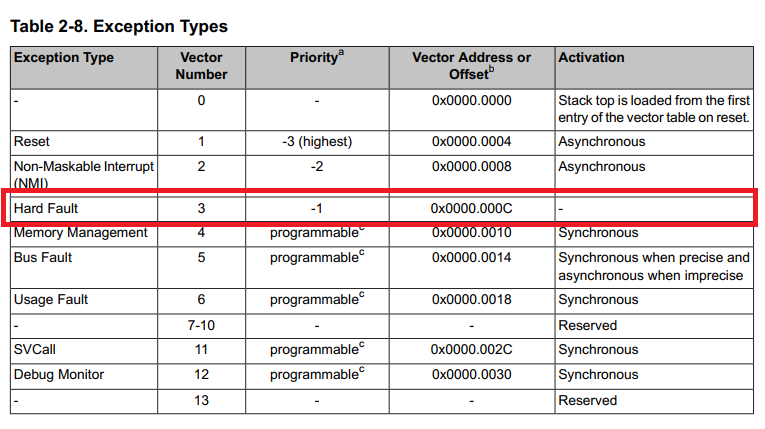
Following the tutorial http://www.ti.com/lit/an/spma043/spma043.pdf , I found that it is Hard Fault:

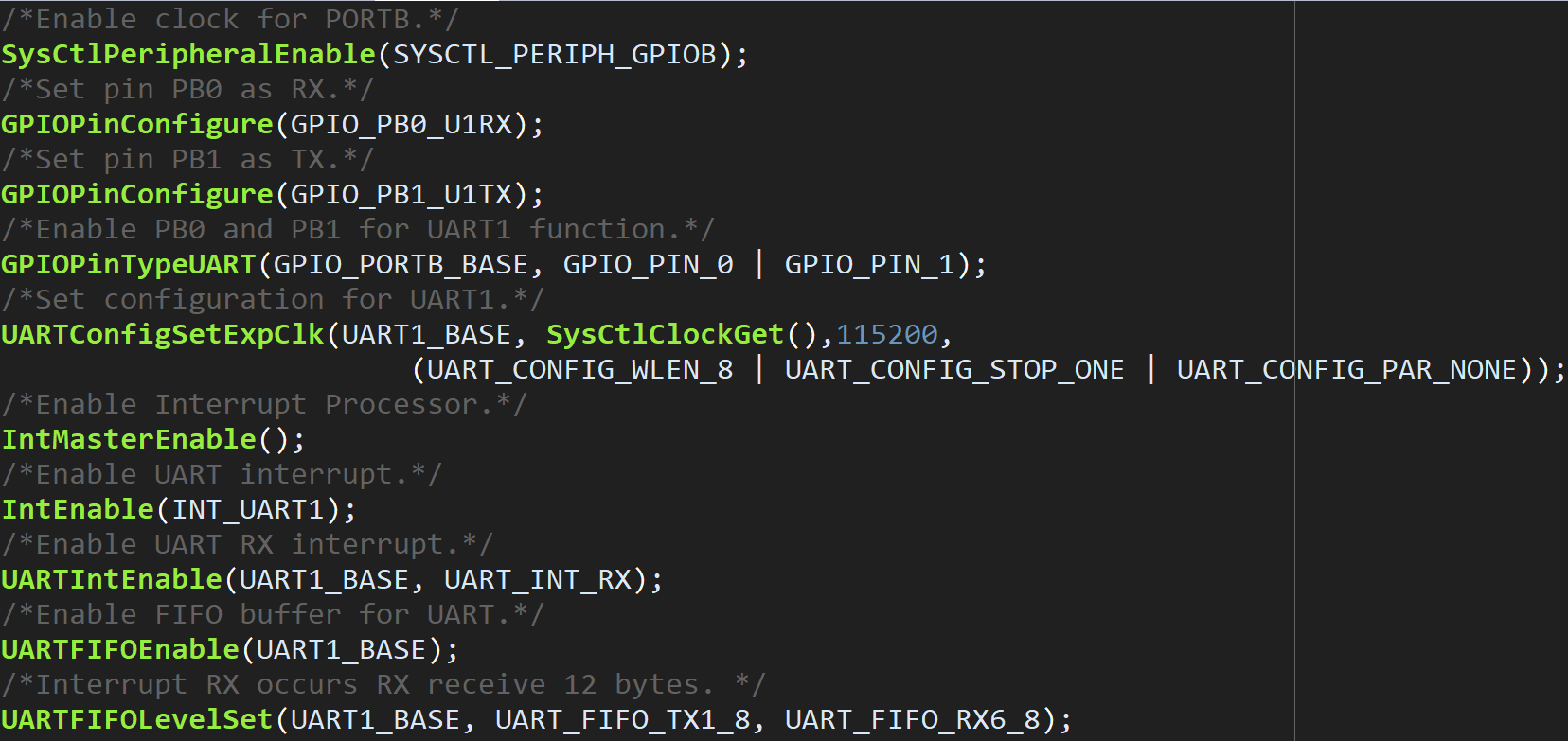
and here is the configurations of UART1 and UART3:

Could somebody please help me fix the problem. This is the first time I have faced this problem so I don't know how to deal with it.
Thank you for your time.


