Part Number: EK-TM4C123GXL
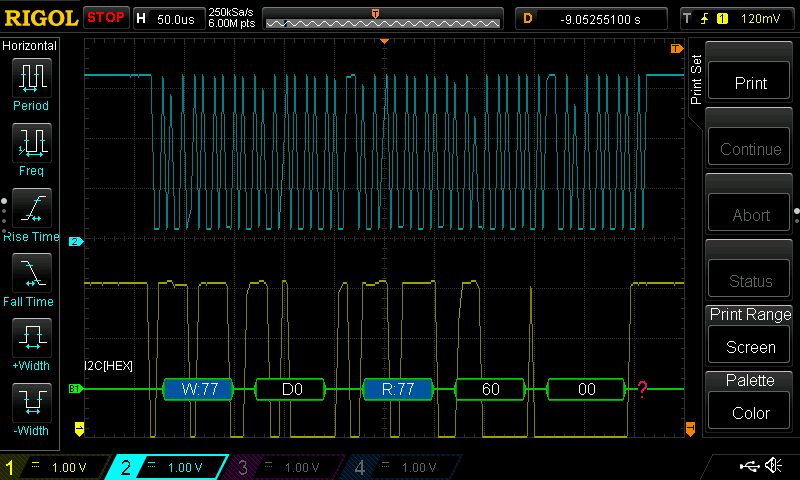
I recently bought a TM4C123 LaunchPad with BOOSTXL-SENSORS Sensor booster pack. I am trying to use the onboard BME280 sensor using Bosch API.So far, I2C read part works only for reading the device id, the I2C write part doesn't work at all. Kindly help.
#include<stdint.h>
#include<stdbool.h>
#include<stdio.h>
#include <string.h>
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "inc/hw_types.h"
#include "driverlib/gpio.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "driverlib/i2c.h"
#include "utils/uartstdio.h"
#include "functions.h"
#include "bme280.h"
#include "bme280_defs.h"
int8_t stream_sensor_data_normal_mode(struct bme280_dev *dev);
void print_sensor_data(struct bme280_data *comp_data);
void main()
{
SysCtlClockSet(SYSCTL_SYSDIV_2_5 | SYSCTL_USE_PLL | SYSCTL_OSC_MAIN |
SYSCTL_XTAL_16MHZ);
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
InitConsole();
UARTprintf("UART OK \n");
InitI2C1();
UARTprintf("I2C OK \n");
struct bme280_dev dev;
int8_t rslt = BME280_OK;
dev.dev_id = 0x77;
dev.intf = BME280_I2C_INTF;
dev.read = user_i2c_read;
dev.write = user_i2c_write;
dev.delay_ms = user_delay_ms;
rslt = bme280_init(&dev);
stream_sensor_data_normal_mode(&dev);
}
int8_t stream_sensor_data_normal_mode(struct bme280_dev *dev)
{
int8_t rslt;
uint8_t settings_sel;
struct bme280_data comp_data;
/* Recommended mode of operation: Indoor navigation */
dev->settings.osr_h = BME280_OVERSAMPLING_1X;
dev->settings.osr_p = BME280_OVERSAMPLING_16X;
dev->settings.osr_t = BME280_OVERSAMPLING_2X;
dev->settings.filter = BME280_FILTER_COEFF_16;
dev->settings.standby_time = BME280_STANDBY_TIME_62_5_MS;
settings_sel = BME280_OSR_PRESS_SEL;
settings_sel |= BME280_OSR_TEMP_SEL;
settings_sel |= BME280_OSR_HUM_SEL;
settings_sel |= BME280_STANDBY_SEL;
settings_sel |= BME280_FILTER_SEL;
rslt = bme280_set_sensor_settings(settings_sel, dev);
rslt = bme280_set_sensor_mode(BME280_NORMAL_MODE, dev);
UARTprintf("Temperature, Pressure, Humidity\r\n");
while (1) {
/* Delay while the sensor completes a measurement */
dev->delay_ms(1000);
rslt = bme280_get_sensor_data(BME280_ALL, &comp_data, dev);
print_sensor_data(&comp_data);
}
return rslt;
}
void print_sensor_data(struct bme280_data *comp_data)
{
#ifdef BME280_FLOAT_ENABLE
UARTprintf("%0.2f, %0.2f, %0.2f\r\n",comp_data->temperature, comp_data->pressure, comp_data->humidity);
#else
UARTprintf("%l, %l, %l\r\n",comp_data->temperature, comp_data->pressure, comp_data->humidity);
#endif
}
void InitConsole(void)
{
SysCtlPeripheralEnable (SYSCTL_PERIPH_GPIOA);
GPIOPinConfigure (GPIO_PA0_U0RX);
GPIOPinConfigure (GPIO_PA1_U0TX);
SysCtlPeripheralEnable (SYSCTL_PERIPH_UART0);
UARTClockSourceSet(UART0_BASE, UART_CLOCK_SYSTEM);
GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
UARTStdioConfig(0, 115200, SysCtlClockGet());
}
void InitI2C1(void)
{
SysCtlPeripheralEnable (SYSCTL_PERIPH_I2C1);
GPIOPinTypeI2C(GPIO_PORTA_BASE, GPIO_PIN_6 | GPIO_PIN_7);
GPIOPinTypeI2CSCL(GPIO_PORTA_BASE, GPIO_PIN_6);
GPIOPinConfigure (GPIO_PA6_I2C1SCL);
GPIOPinConfigure (GPIO_PA7_I2C1SDA);
I2CMasterInitExpClk(I2C1_BASE, SysCtlClockGet(), false);
}
void I2CSend(uint8_t slave_addr, uint8_t num_of_args, ...)
{ int i;
// Tell the master module what address it will place on the bus when
// communicating with the slave.
I2CMasterSlaveAddrSet(I2C1_BASE, slave_addr, false);
//stores list of variable number of arguments
va_list vargs;
//specifies the va_list to "open" and the last fixed argument
//so vargs knows where to start looking
va_start(vargs, num_of_args);
//put data to be sent into FIFO
I2CMasterDataPut(I2C1_BASE, va_arg(vargs, uint32_t));
//if there is only one argument, we only need to use the
//single send I2C function
if (num_of_args == 1)
{
//Initiate send of data from the MCU
I2CMasterControl(I2C1_BASE, I2C_MASTER_CMD_SINGLE_SEND);
// Wait until MCU is done transferring.
while (I2CMasterBusy(I2C1_BASE))
;
//"close" variable argument list
va_end(vargs);
}
//otherwise, we start transmission of multiple bytes on the
//I2C bus
else
{
//Initiate send of data from the MCU
I2CMasterControl(I2C1_BASE, I2C_MASTER_CMD_BURST_SEND_START);
// Wait until MCU is done transferring.
while (I2CMasterBusy(I2C1_BASE))
;
//send num_of_args-2 pieces of data, using the
//BURST_SEND_CONT command of the I2C module
for (i = 1; i < (num_of_args - 1); i++)
{
//put next piece of data into I2C FIFO
I2CMasterDataPut(I2C1_BASE, va_arg(vargs, uint32_t));
//send next data that was just placed into FIFO
I2CMasterControl(I2C1_BASE, I2C_MASTER_CMD_BURST_SEND_CONT);
// Wait until MCU is done transferring.
while (I2CMasterBusy(I2C1_BASE))
;
}
//put last piece of data into I2C FIFO
I2CMasterDataPut(I2C1_BASE, va_arg(vargs, uint32_t));
//send next data that was just placed into FIFO
I2CMasterControl(I2C1_BASE, I2C_MASTER_CMD_BURST_SEND_FINISH);
// Wait until MCU is done transferring.
while (I2CMasterBusy(I2C1_BASE))
;
//"close" variable args list
va_end(vargs);
}
}
void user_delay_ms(uint32_t period)
{
SysCtlDelay((SysCtlClockGet() / 1000) * (uint32_t) period);
}
int8_t user_i2c_read(uint8_t dev_id, uint8_t reg_addr, uint8_t *reg_data,
uint16_t len)
{
int8_t rslt = 0; /* Return 0 for Success, non-zero for failure */
/*
* The parameter dev_id can be used as a variable to store the I2C address of the device
*/
/*
* Data on the bus should be like
* |------------+---------------------|
* | I2C action | Data |
* |------------+---------------------|
* | Start | - |
* | Write | (reg_addr) |
* | Stop | - |
* | Start | - |
* | Read | (reg_data[0]) |
* | Read | (....) |
* | Read | (reg_data[len - 1]) |
* | Stop | - |
* |------------+---------------------|
*/
I2CMasterSlaveAddrSet(I2C1_BASE, (uint8_t) dev_id, false);
I2CMasterDataPut(I2C1_BASE, (uint8_t) reg_addr);
I2CMasterControl(I2C1_BASE, I2C_MASTER_CMD_BURST_SEND_START);
while (I2CMasterBusy (I2C1_BASE))
;
I2CMasterControl(I2C1_BASE, I2C_MASTER_CMD_BURST_SEND_FINISH);
I2CMasterSlaveAddrSet(I2C1_BASE, dev_id, true);
while (len--)
{
I2CMasterControl(I2C1_BASE, I2C_MASTER_CMD_BURST_RECEIVE_START);
while (I2CMasterBusy (I2C1_BASE))
;
*reg_data = I2CMasterDataGet(I2C1_BASE);
reg_data++;
}
return rslt;
}
int8_t user_i2c_write(uint8_t dev_id, uint8_t reg_addr, uint8_t *reg_data,
uint16_t len)
{
int8_t rslt = 0; /* Return 0 for Success, non-zero for failure */
/*
* The parameter dev_id can be used as a variable to store the I2C address of the device
*/
/*
* Data on the bus should be like
* |------------+---------------------|
* | I2C action | Data |
* |------------+---------------------|
* | Start | - |
* | Write | (reg_addr) |
* | Write | (reg_data[0]) |
* | Write | (....) |
* | Write | (reg_data[len - 1]) |
* | Stop | - |
* |------------+---------------------|
*/
I2CSend(dev_id,1,reg_addr);
while(len--)
{
I2CSend(dev_id,1,*reg_data);
reg_data++;
}
}