


Part Number: TMS570LS0432
Other Parts Discussed in Thread: HALCOGEN
Hello,
I am a newbie who really wants to learn developing embedded applications. I have a TMS570LS launchpad and i am trying to communicate with launchpad through peakCAN. My application requirement is this; it should be able to receive a message with ID 0x34, light the LEDs according to the first byte of the message i'll receive, read the state of the LEDs and transmit a message back to the network indicating the state of the LEDs.
My HalCoGEN configuration;
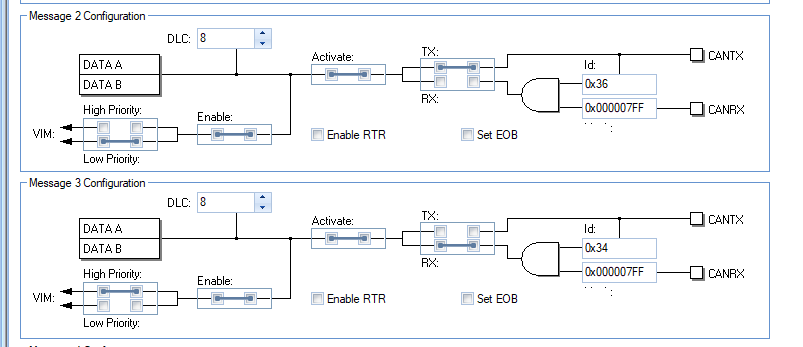
I have configured message box 2 as transmit with the ID of 0x36 and box 3 as receive with 0x34.
My code;
main;
#include "can_practice2.h"
#include "Device.h"
#include "sys_core.h"
int main(void)
{
canConfgInit();
for (;;)
{
canGetFrame();
lightLED();
readStateLED();
wait(100);
sendStateLED();
}
}
can application;
/*
* can_practice2.c
*
* Created on: 17 Haz 2019
* Author: user
*/
#include "sys_common.h"
#include "system.h"
#include "gio.h" // Device Headers //
#include "can.h"
#include "esm.h"
#include "Device.h"
#include "can_practice2.h"
uint8 LED_Requests[8] = {0,0,0,0,0,0,0,0}; // Assign an initial value to the to be received input
uint8 StateLED1 = 0; // Assign the initial value of state of the LED 1 zero
uint8 StateLED2 = 0; // Assign the initial value of state of the LED 1 zero
uint8 CAN_TX_Message[8] = {0}; // Create an transmit array of zeros
uint8 *rx_ptr = &LED_Requests[0];
void canConfgInit(void)
{
deviceInit(); // Initiate GIO & CAN
setBitDirection(gioPORTA,0,1U); // GPIO 0 set as output
setBitDirection(gioPORTA,1,1U); // GPIO 1 set as output
}
void canGetFrame(void)
{
//while(!canIsRxMessageArrived(canREG1, canMESSAGE_BOX2));
canGetData(canREG1,canMESSAGE_BOX3,rx_ptr); // Read the CAN message box 2 and write it to the address of LED_Requests
}
void lightLED(void)
{
switch (LED_Requests[0])
{
case 0:
gioSetBit(gioPORTA,0,0U);
gioSetBit(gioPORTA,1,0U);
break;
case 1:
gioSetBit(gioPORTA,0,1U);
gioSetBit(gioPORTA,1,0U);
break;
case 2:
gioSetBit(gioPORTA,0,0U);
gioSetBit(gioPORTA,1,1U);
break;
case 3:
gioSetBit(gioPORTA,0,1U);
gioSetBit(gioPORTA,1,1U);
break;
}
}
void readStateLED (void)
{
StateLED1 = gioGetBit(gioPORTA,0);
StateLED2 = gioGetBit(gioPORTA,1);
}
void sendStateLED (void)
{
CAN_TX_Message[0] = StateLED1;
CAN_TX_Message[7] = StateLED2;
canTransmit(canREG1,canMESSAGE_BOX2,&CAN_TX_Message);
}
But this doesn't work. Code compiles successfully, LEDs light when i change the initial values from the array itself, LEDs states can be read and transmitted over CAN but receive is not happening. When i debug the canGetData function itself, i see it moves forward but when i uncomment while(!canIsRxMessageArrived) program stucks there, indicating message box is not receiving anything. Where i am doing wrong ? As i said i am a newbie and any help would be highly appreciated. Thank you.
