


Tool/software: Code Composer Studio
Hi Team,
I tried to do the "direct register access model" programming on the "TM4C123G LaunchPad" through ccs, but met a problem at the beginning.
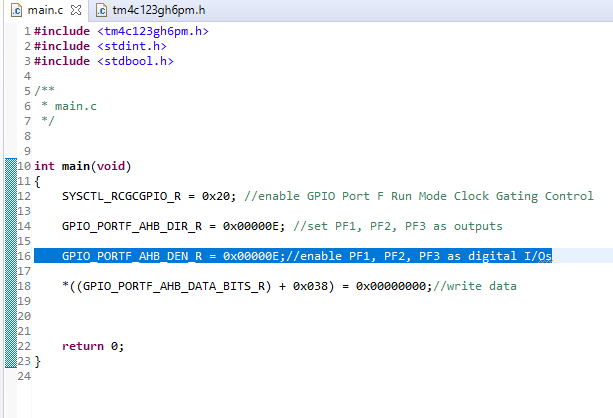
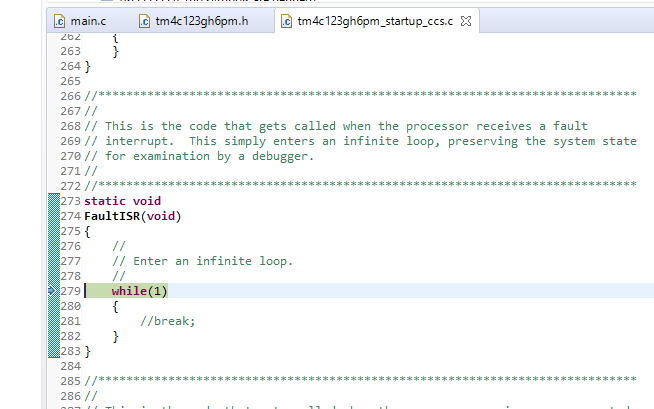
As showed in the image blow left, there are simple codes to configure the PF1/PF2/PF3 as output and set their value as 0. While debugging when i am trying to "step over" the highlight step, the program will run into the "fault while loop". I do not know why this would happen. Could you help to provide some instruction/comments on it. Thanks.
 |
 |
Thanks and best regards,
Felix


