Part Number: EK-TM4C123GXL
Other Parts Discussed in Thread: TM4C123GH6PM
Hi,
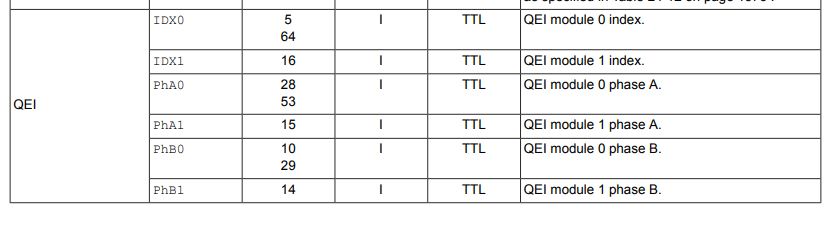
I have an OMRON E6B2-CWZ1X quadrature encoder which I would like to connect to a EK-TM4C123GXL board but I don’t know which pins on the board should be used.
Thanks.
Part Number: EK-TM4C123GXL
Other Parts Discussed in Thread: TM4C123GH6PM
Hi,
I have an OMRON E6B2-CWZ1X quadrature encoder which I would like to connect to a EK-TM4C123GXL board but I don’t know which pins on the board should be used.
Thanks.