Part Number: TM4C123GH6PM
Other Parts Discussed in Thread: SN65HVD230
Tool/software: Code Composer Studio
Hello,
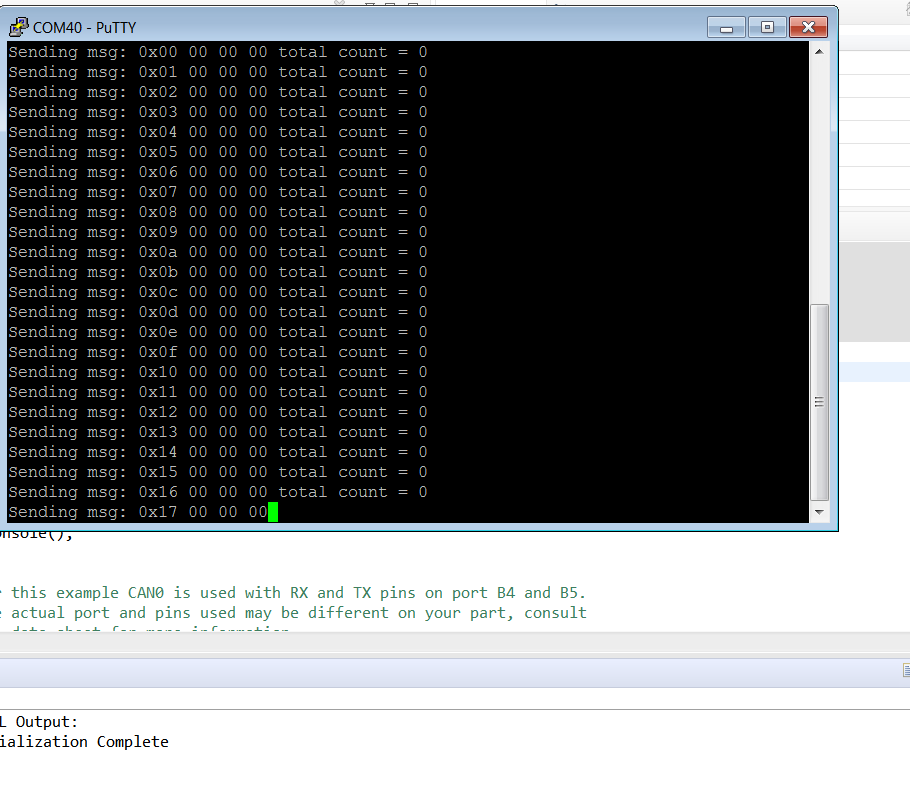
I am using 2 TM4C123GH6PM boards and CAN0 and UART0 of both the boards. I have taken CAN bus example from Dk-TM4C123G
board example. I have deleted the LCD part because I don't need this for my testing.
I am using 2 CJMCU-30 transceiver having IC SN65HVD230.
I am not getting output at all.
I have checked hardware connection, they are correct and the code is also error-free
and debugging properly.
I have changed CAN0 pins then also I am not getting
the output.
Please help me to find the solution to this problem