Tool/software: Code Composer Studio
Hello,
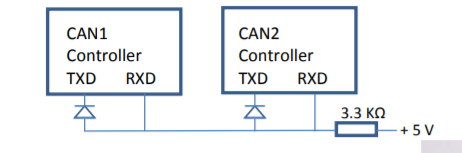
I have implemented a small node of CAN using 1N4148 diodes connected to Tx of both microcontrollers I am sharing the schematic diagram.
I have tried simpler_x.c,simple_tx.c codes from Tivaware peripheral example codes. I am getting output but when I am sending a string to through can bus, can RX object receiving only two characters.
example if I am sending hello then it receiving only "he ". I am doing the project in which I have to sensors values over can bus how to send and receive multiple characters or strings over can bus.
please guide me, what changes I have to do in the code?
thanks and regards
Deoyani