


Other Parts Discussed in Thread: HALCOGEN, ISO1042DWEVM
I'm using the Launchpad to try to send and receive CAN messages with the PCan-View software. I am using the ISO1042DWEVM transceiver module. It will send messages from the TX message boxes, but the RX boxes won't receive their messages. Here's the setup in HalCoGen:
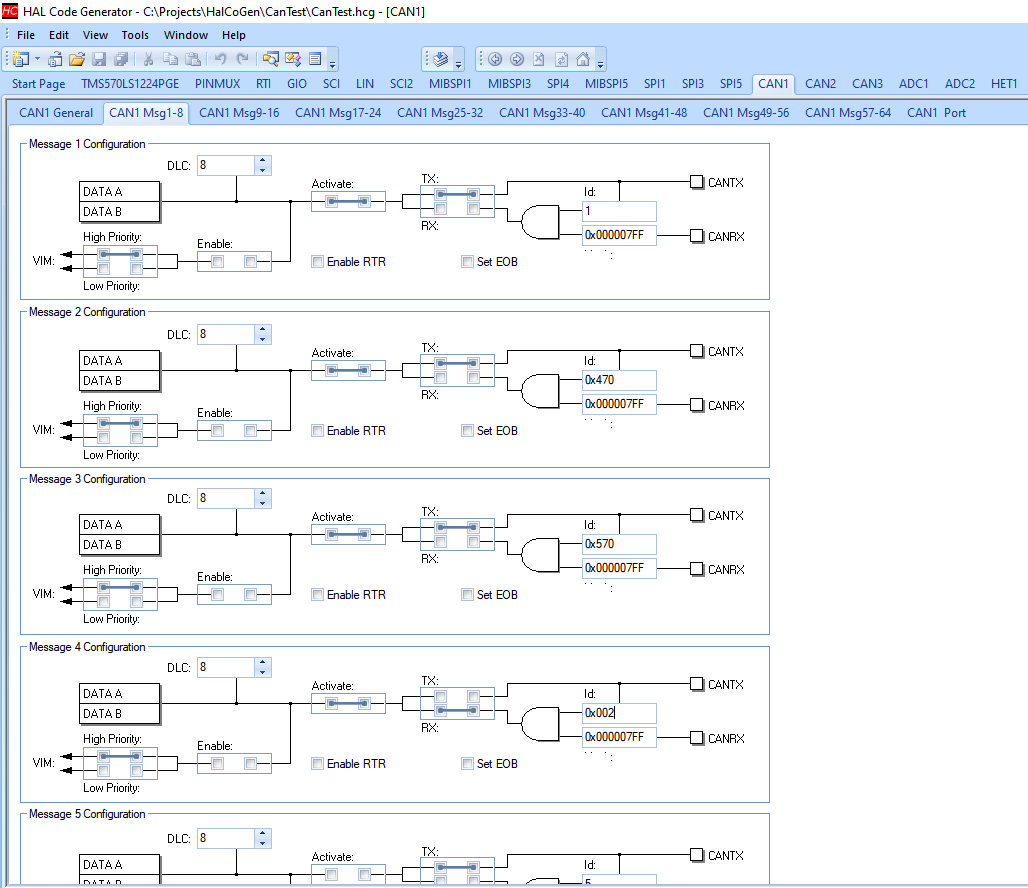
I've setup the first four mailboxes in a similar way to the example.
Here's the code I'm using:
/* USER CODE BEGIN (0) */
/* USER CODE END */
/* Include Files */
#include "sys_common.h"
/* USER CODE BEGIN (1) */
#include "system.h"
#include "can.h"
#include "esm.h"
#define D_SIZE 9
uint8 tx_data[D_SIZE] = {'H','E','R','C','U','L','E','S','\0'};
uint8 tx_data1[D_SIZE] = {0x4, 0x7, 0x0, 0x0, 0x4, 0x7, 0x0, 0x0, 0x0};
uint8 tx_data2[D_SIZE] = {0x5, 0x7, 0x0, 0x0, 0x5, 0x7, 0x0, 0x0, 0x0};
uint8 rx_data[D_SIZE] = {0};
uint32 error = 0;
uint32 checkPackets(uint8 *src_packet,uint8 *dst_packet,uint32 psize);
/* USER CODE END */
/** @fn void main(void)
* @brief Application main function
* @note This function is empty by default.
*
* This function is called after startup.
* The user can use this function to implement the application.
*/
/* USER CODE BEGIN (2) */
/* USER CODE END */
int main(void)
{
/* USER CODE BEGIN (3) */
/* initialize can 1 and 2 */
canInit(); /* can1 -> can2 */
/* transmit on can1 */
canTransmit(canREG1, canMESSAGE_BOX1, tx_data);
canTransmit(canREG1, canMESSAGE_BOX2, tx_data1);
canTransmit(canREG1, canMESSAGE_BOX3, tx_data2);
/*... wait until message receive on can1 */
while(!canIsRxMessageArrived(canREG1, canMESSAGE_BOX4));
canGetData(canREG1, canMESSAGE_BOX4, rx_data); /* receive on can1 */
/* check received data patterns */
//error = checkPackets(&tx_data[0],&rx_data[0],D_SIZE);
canTransmit(canREG1, canMESSAGE_BOX2, rx_data);
/* ... run forever */
while(1);
/* USER CODE END */
return 0;
}
My problem is that I can run the program, it will send the messages from message boxes 1,2, and 3, but when I am sending a constant message from PCan-View with message ID 0x2, it is continually stuck in the while loop waiting for an RX message to arrive.
I have been able to get a PSoC microcontroller to receive the message from PCan-View, but the TI processor seems unresponsive to receiving messages. Is there something different I need to change in the initialization of the CAN on the processor or some other code I need to use? I haven't set up the processor to use interrupt based CAN.
