Part Number: TM4C123GH6PM
I am connecting the DAC084SO to the TIVA C series Launch pad using SPI protocol in SSI0.
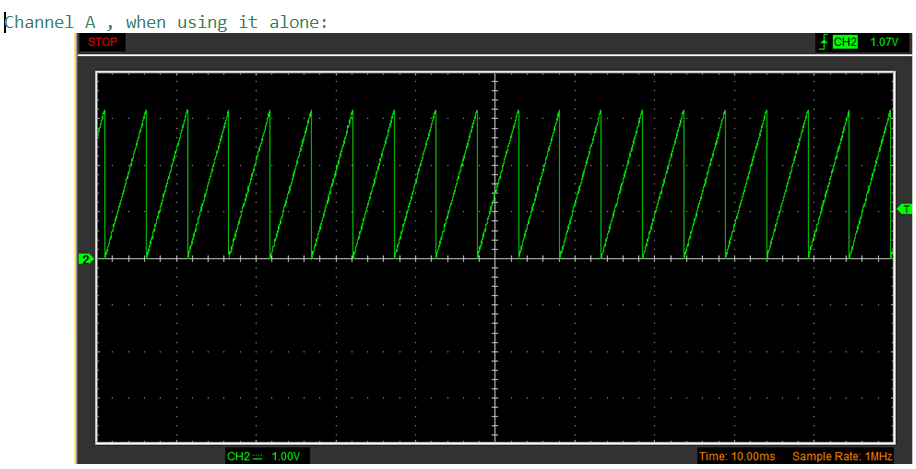
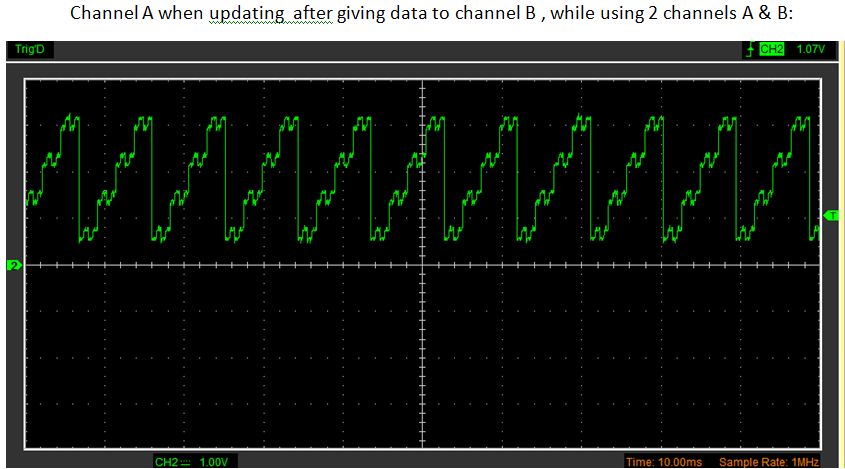
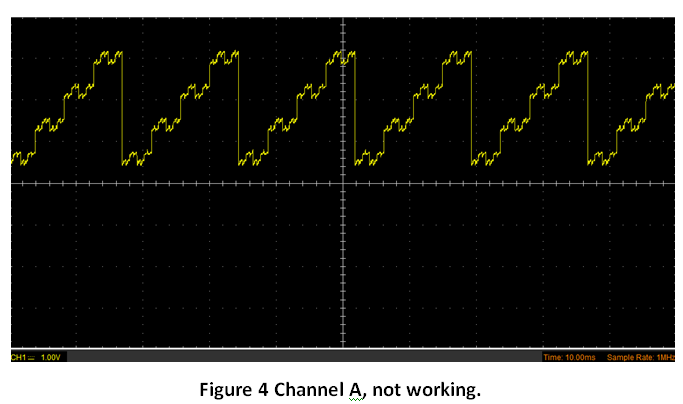
I write the same input values (a triangular wave form using the while loop with counter) to all 4 channels and I am getting the required output in the channels 2,3 and 4. However, I am getting disrupted output in output channel 1.
I have pasted the oscilloscope screen shots of the 3 working outputs and the 1 disrupted output below:

I have pasted the code below:
#include <stdbool.h>
#include <stdint.h>
#include "inc/hw_memmap.h"
#include "driverlib/gpio.h"
#include "driverlib/pin_map.h"
#include "driverlib/ssi.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "utils/uartstdio.h"
//*****************************************************************************
//! Trying to get DAC SSI 084 working. 4 channel.
//!
//! This example uses the following peripherals and I/O signals. You must
//! review these and change as needed for your own board:
//! - SSI0 peripheral
//! - GPIO Port A peripheral (for SSI0 pins)
//! - SSI0Clk - PA2
//! - SSI0Fss - PA3
//! - SSI0Rx - PA4
//! - SSI0Tx - PA5
#define NUM_SSI_DATA 3
int
main(void)
{
uint8_t loopCount = 0;
uint16_t dacAaddress_dontUpdate = 0b0000;// Writing to regster 00 A , not updating till D is written
uint16_t dacBaddress_dontUpdate = 0b0100;// Writing to regster 01 B, not updating till D is written
uint16_t dacCaddress_dontUpdate = 0b1000;// Writing to regster 10 C, not updating till D is written
uint16_t dacDaddress_doUpdate = 0b1101;// Writing to regster 11 D, updating all outputs as D is written
// Shift the address and update bits 8 bits inside so that you can use OR operator to write the last 8 bits
dacAaddress_dontUpdate = dacAaddress_dontUpdate<<8;
dacBaddress_dontUpdate = dacBaddress_dontUpdate<<8;
dacCaddress_dontUpdate = dacCaddress_dontUpdate<<8;
dacDaddress_doUpdate = dacDaddress_doUpdate<<8;
SysCtlClockSet(SYSCTL_SYSDIV_1 | SYSCTL_USE_OSC | SYSCTL_OSC_MAIN | SYSCTL_XTAL_16MHZ);
// The SSI0 peripheral must be enabled for use.
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI0);
// For this example SSI0 is used with PortA[5:2].
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
// Configure the pin muxing for SSI0 functions on port A2, A3, A4, and A5.
GPIOPinConfigure(GPIO_PA2_SSI0CLK);
GPIOPinConfigure(GPIO_PA3_SSI0FSS);
GPIOPinConfigure(GPIO_PA4_SSI0RX);
GPIOPinConfigure(GPIO_PA5_SSI0TX);
// Configure the GPIO settings for the SSI pins. This function also gives
// control of these pins to the SSI hardware. Consult the data sheet to
// see which functions are allocated per pin.
// The pins are assigned as follows:
// PA5 - SSI0Tx
// PA4 - SSI0Rx
// PA3 - SSI0Fss
// PA2 - SSI0CLK
GPIOPinTypeSSI(GPIO_PORTA_BASE, GPIO_PIN_5 | GPIO_PIN_4 | GPIO_PIN_3 |GPIO_PIN_2);
// Configure and enable the SSI port for TI master mode. Use SSI0, system
// clock supply, master mode, 1MHz SSI frequency, and 16-bit data.
// Bit rate has to be 2MHz or higher
SSIConfigSetExpClk(SSI0_BASE, SysCtlClockGet(), SSI_FRF_TI,SSI_MODE_MASTER, 1000000, 16);
// Enable the SSI0 module.
SSIEnable(SSI0_BASE);
while(1){
// Now use OR operator to put your control value in the input bits
// Loop count is a 8 bit value . So will modify the last 8 bits of parent only.
// Now shift all the input variables to 4 bits inside further.
// Input variable to the DAC048S is 16 bit and last 4 bits are expected to be useless.
// Without shifting inside , the last 8 bits of the now 12 bit word will be neglected!.
SSIDataPut(SSI0_BASE, ((dacAaddress_dontUpdate | loopCount)<<4));
SSIDataPut(SSI0_BASE, ((dacBaddress_dontUpdate | loopCount)<<4));
SSIDataPut(SSI0_BASE, ((dacCaddress_dontUpdate | loopCount)<<4));
SSIDataPut(SSI0_BASE, ((dacDaddress_doUpdate | loopCount)<<4));
while(SSIBusy(SSI0_BASE)){}
loopCount++;
if (loopCount==255)
loopCount=0;
}
}
// UART interrupt handler, definition in main program
// Simply because we put this in NVIC table in startup ccs file, something has to be here.
void UARTIntHandler(void)
{
}
Any help on why one channel is not working smoothly?