Part Number: TM4C1294NCPDT
Other Parts Discussed in Thread: EK-TM4C1294XL
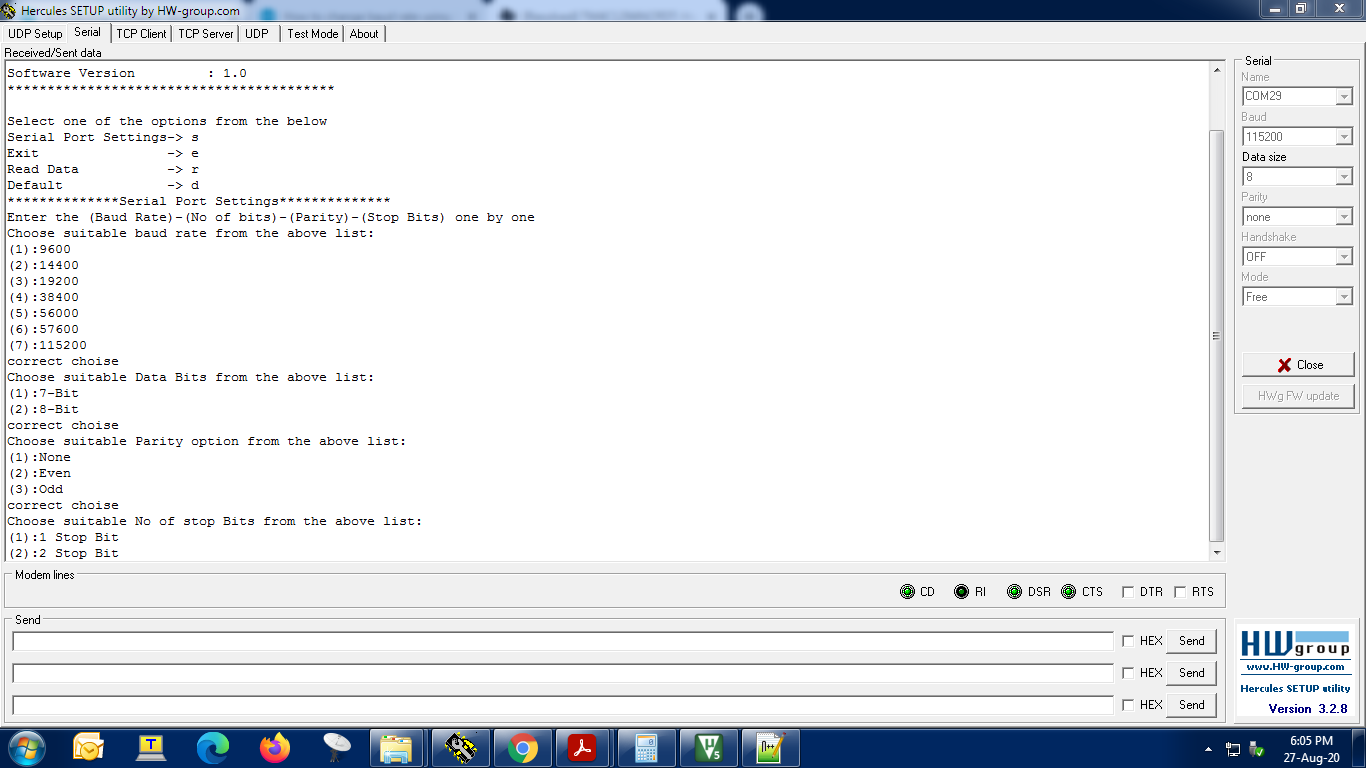
I was trying UART on the EK-TM4C1294XL. Basically I have a task to write code
for uart. On uart terminal, menu will get printed in which user will have a option
to choose specific settings for the serial terminal according to there requirement.
So user can be able to change baud rate during run time. Here first thing need to check is
whether user entered right baud rate or not.
We have "UARTCharGet(UART0_BASE)" api so using this we can
get data from user but if user entered "9600" and it will come like this
9->0x39
6->0x36
0->0x30
0->0x30
so one by one bit will get stored into the buffer.
Now the question arises that how we can pass the new baud rate which is entered by user to the "UARTConfigSetExpClk"
Any help will be really appreciated!!