


Part Number: TMS570LC4357
Other Parts Discussed in Thread: HALCOGEN
I've configured this message box for RTR, and it gets invoked when RTR request arrives. See pic below:
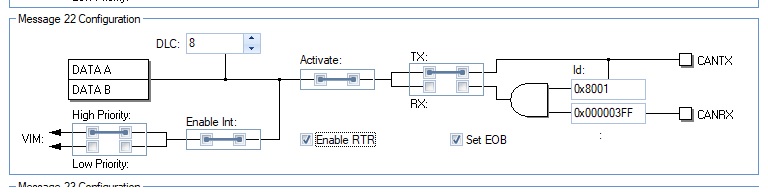
But, I have unwanted behavior , fact that the CAN controller seems automatically fires replies with whatever it had last loaded into this message box.
So, for example, if I hold the CPU halted with debugger, and send RTR frame from PC host, I get reply from the devboard, even though the code is not running, so the CAN controller seems handling this request automatically.
Which I do not want at all, I need to reply to this request from the code.
And because I also have my own send response, now I get effectively two responses from the card: one which it always fires automatically, followed by my the reply as from code.
My CAN trace would look like this:
 I read for other TI chip (here : https://www.ti.com/lit/ug/sprueu0/sprueu0.pdf?ts=1598526170937&ref_url=https%253A%252F%252Fwww.google.com%252F) allows to disable this "Auto-Answer" mailbox/object feature, but I do not see how / where to do this with TMS570.
I read for other TI chip (here : https://www.ti.com/lit/ug/sprueu0/sprueu0.pdf?ts=1598526170937&ref_url=https%253A%252F%252Fwww.google.com%252F) allows to disable this "Auto-Answer" mailbox/object feature, but I do not see how / where to do this with TMS570.
Is it possible to remove this automatic handling? To pre-load values in advance into that box is not a good thing for me.

