Part Number: TM4C1294NCPDT
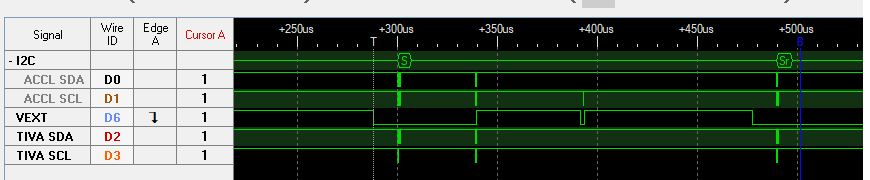
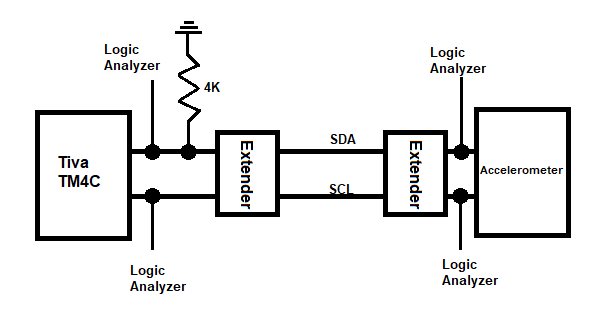
Hi - We have a Tiva TM4C1294NCPDT communicating with an Analog Devices ADXL355 accelerometer. I'm seeing an issue where communication drops out sometimes; possibly due to noise. This results in the I2C_MASTER_ERR_ARB_LOST error returned from the TivaWare Lib I2CMasterErr() function.
When this happens, I'm having trouble restarting communication with the accelerometer. Even when performing a reset on the I2C peripheral using SysCtlPeripheralDisable(SYSCTL_PERIPH_I2C0) and then reinitializing using SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C0) I still get the same I2C_MASTER_ERR_ARB_LOST error and cannot reestablish communication with the accelerometer.
The only way to reestablish communication is with a reset or power cycle of the Tiva, which is very undesirable for our use case. Any information anyone can provide on reestablishing communications using the TivaWare without a power cycle or reset would be very helpful.
Thank you,
Terence