Part Number: TM4C129ENCPDT
Hi,
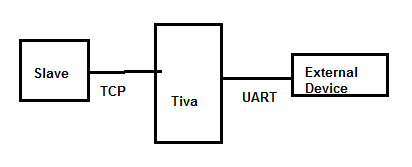
I am working on TM4C129ENCPDET as the main controller. I want to send data from the peripheral module using TCP/IP data transfer. Peripheral module interfaced with the controller via UART communication. I am using a while loop for waiting data from this peripheral module. But code tuck on this loop and no data transfer. I am using the TCP echo server code as a reference. Please support.
Regards
GPM