Part Number: TMS570LS3137
Hi,
I would like to develop a bare metal application for the TMS570LS3137 with ti-cgt-arm_20.2.4.LTS and use C++ with exception support.
C++ without exceptions is working nicely, but as soon as I add an exception to the code and the "exceptions" flag to the compiler arguments the linker is unhappy.
The documentation of ti mentions in section 5.8 that exception handling is supported, and in 7.1 its eplained how to link with exception support and in 7.1.8 teh naming convetion for the libraries.
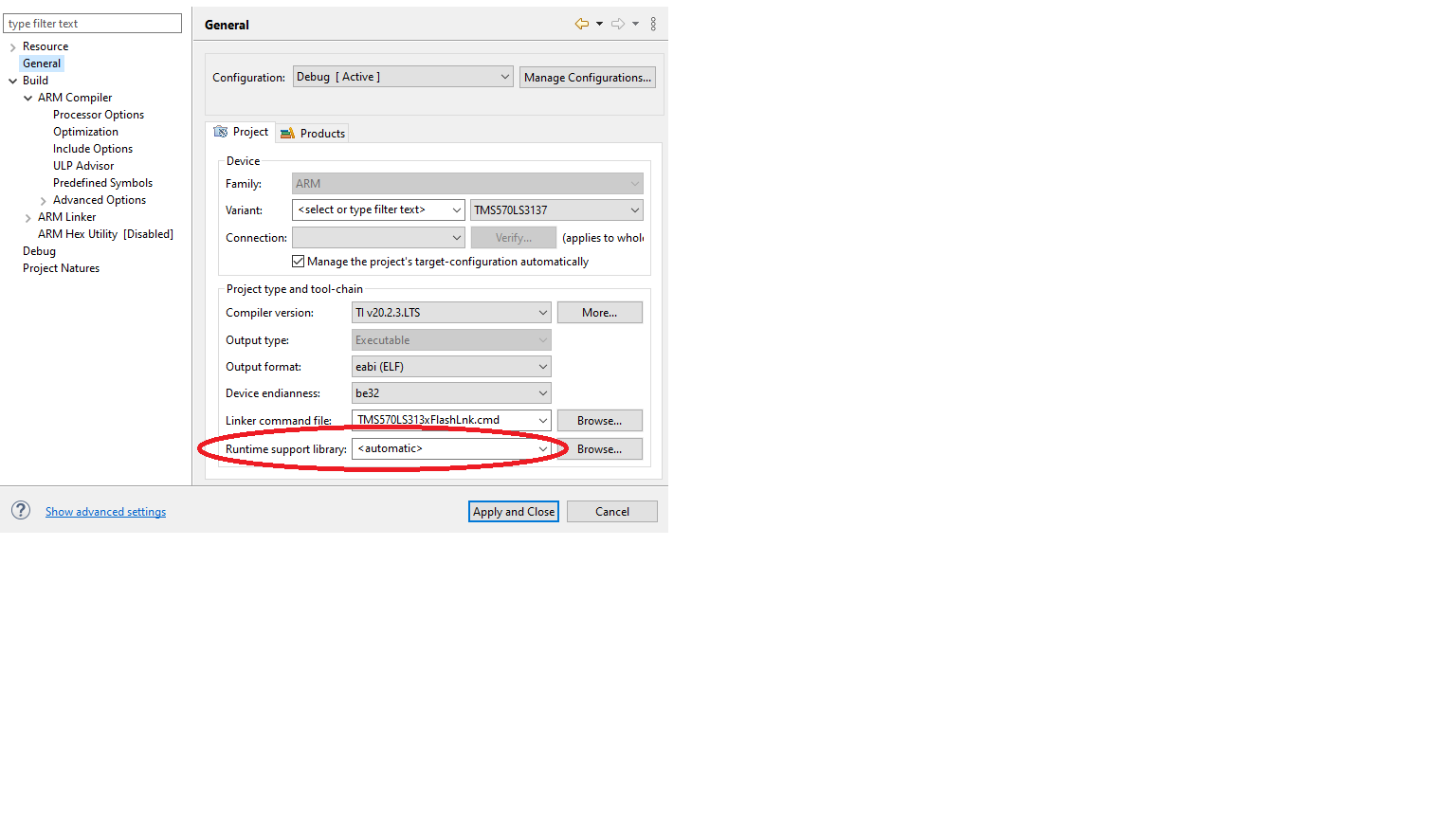
But there are no libraries with the ending _eh installed on my computer by ti. I would expect a file like: "rtsv7R4_T_be_v3D16_eabi_eh"
As the documentation states clearly its supported I must have made some mistake. I downloaded the toolchain from: ARM-CGT Arm® code generation tools - compiler | TI.com and used ARM-CGT-19.
Could you please help me?
Best regards,
Karsten