Other Parts Discussed in Thread: HALCOGEN, TMS570LC4357
Hi Team,
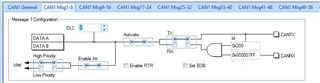
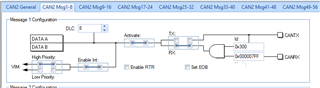
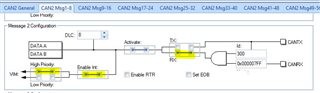
I have tried the CANTx program which is given in Hercules Tutorial : CAN Communication in TI using TMDX570LC43HDK board I used CAN1 driver.
I have configured as per this tutorial "Hercules Tutorial : CAN Communication .
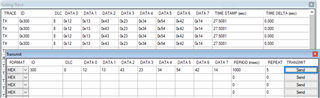
Tried to receive data in CAN BUS Analyzer tool. But It doesn't came.
I need a help to solve this issue.