


Other Parts Discussed in Thread: CONTROLSUITE, C2000WARE
HI. I have big trouble HW setting in F28377D.
I finished setting up the ADC, PWM and CLA peripheral register.
I checked ADC starts of conversion at PWM count zero and at the EOC, adca1_isr function to be executed in a RAM section.
After that, I wanted to run a code standalone in the flash area without a debugger but there was a problem.
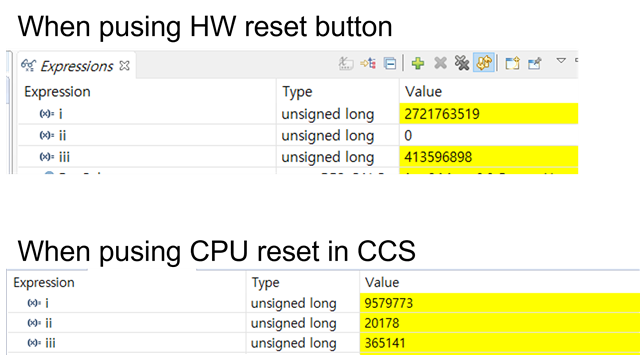
When I click CPU reset icon in the CCS debug window, PWM and ADC worked well
When I pushed HW reset button on my board(/XRS), PWM was well but ADC interrupt didn't work
I checked PWM output doing well from an oscilloscope.
I've touched a lot of the code to find the cause, but I haven't.
The variable 'i' is counter for main function, 'ii' is for adca1_isr interrupt and 'iii' is for CLA interrupt.
GPIO84, 72 are pulled up.
Please give me some advice.
Thanks
int main(void) {
asm(" setc INTM");
DINT; // Clear all __interrupts and initialize PIE vector table:
IER = 0x0000; // Disable CPU __interrupts
IFR = 0x0000; // Disable CPU __interrupts and clear all CPU __interrupt flags:
InitSysCtrl(); // Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xD_SysCtrl.c file.
InitGpio(); // Initialize GPIO:
// This example function is found in the F2837xD_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
InitPieCtrl(); // Initialize PIE:
// InitPieCtrl - This function initializes the PIE control registers to a
// known state.
InitPieVectTable(); // Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xD_DefaultIsr.c.
// This function is found in F2837xD_PieVect.c.
InitEQep(); //Initialize eQEP:
InitCLA(); // Initialize CLA:
ConfigureADC(); //Initialize ADC:
InitEPwm(); // InitEPwm - Initialize EPWM configuration
SetupADCEpwm();
// Interrupts that are used in this example are re-mapped to ISR functions found within this file.
EALLOW; // This is needed to write to EALLOW protected registers
PieVectTable.ADCA1_INT = &adca1_isr; //function for ADCA interrupt 1
PieVectTable.CLA1_1_INT = &cla1Isr1; //function for CLA1 interrupt
//
// Enable global Interrupts and higher priority real-time debug events:
//
IER |= M_INT1; //Enable group 1 interrupts
// IER |= M_INT10; //Enable group 10 interrupts
IER |= M_INT11; //Enable group 11 interrupts
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
//
// enable PIE interrupt
//
PieCtrlRegs.PIEIER1.bit.INTx1 = 1; //for ADC_A INT1 this is high priority
PieCtrlRegs.PIEIER11.bit.INTx1 = 1; // Enable INT 11.1 in the PIE (CLA Task1)
PieCtrlRegs.PIEIER11.bit.INTx8 = 1; // Enable INT 11.8 in the PIE (CLA Task8)
EDIS; // This is needed to disable write to EALLOW protected registers
ResPara.Amp = 0.8;
ResPara.Freq = USER_RES_EXC_FREQ_kHz*1000.0;
ResPara.n = 0;
ResPara.Ts = USER_RES_PWM_PERIOD_sec;
ResPara.Offset = 0.0;
ResPara.Phase = 0.5;
USER_PMW_Config.Freq_kHz = 10;
USER_PMW_Config.Deadtime = Deadtime_1us;
USER_PMW_Config.ADCsampling_CMPC = 72;
for(;;)
{
i++;
GpioDataRegs.GPASET.bit.GPIO24 = CLAflag.CalcStart;
GpioDataRegs.GPACLEAR.bit.GPIO24 = CLAflag.CalcDone;
}
return 0;
}
//
// adca1_isr - Read ADC Buffer in ISR (10kHz)
//
__interrupt void adca1_isr(void)
{
GpioDataRegs.GPATOGGLE.bit.GPIO25 = 1;
ii++;
// toggle status LED
if(++gLEDcnt >= (uint_least32_t)(USER_PMW_Config.Freq_kHz*1000.0 / LED_BLINK_FREQ_Hz))
{
GpioDataRegs.GPATOGGLE.bit.GPIO31 = 1;
gLEDcnt = 0;
}
//
// Check if overflow has occurred
//
while(AdcaRegs.ADCINTFLG.bit.ADCINT1 & AdcbRegs.ADCINTFLG.bit.ADCINT1 & AdccRegs.ADCINTFLG.bit.ADCINT1) //wait ADC conversion process
{
AdcaRegs.ADCINTOVFCLR.bit.ADCINT1 = 1; //clear INT1 overflow flag
AdcbRegs.ADCINTOVFCLR.bit.ADCINT1 = 1; //clear INT1 overflow flag
AdccRegs.ADCINTOVFCLR.bit.ADCINT1 = 1; //clear INT1 overflow flag
AdcaRegs.ADCINTFLGCLR.bit.ADCINT1 = 1; //clear INT1 flag
AdcbRegs.ADCINTFLGCLR.bit.ADCINT1 = 1; //clear INT1 flag
AdccRegs.ADCINTFLGCLR.bit.ADCINT1 = 1; //clear INT1 flag
}
CTRL_run();
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
GpioDataRegs.GPATOGGLE.bit.GPIO25 = 1;
}
