Part Number: TMDSDOCK28335
Other Parts Discussed in Thread: TMS320F28335, C2000WARE
Hi all,
I'm having trouble with Flash programming on TMS320F28335.
Now I'm using a C2000 TMS320F28335, and I want to copy the program from Flash to RAM so that the DSP can work stand alone.
However, the DSP does not work when I press the Debug button in Code Composer Studio (CCS) and write the program to the DSP : PWM waveforms cannot be observed when I run the program.
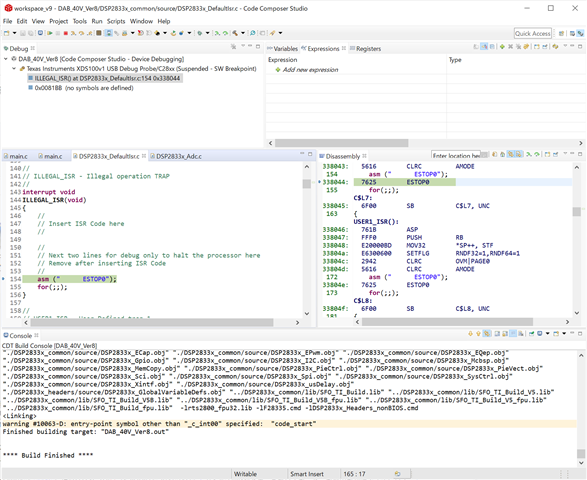
The CCS debug window shows "ILLEGAL_ISR() at DSP2833x_DefaultIsr.c:154 0x338044", but I can't figure out where the problem is.
I attached some picture and the CCS projects that we are currently considering because it is difficult to explain the situation in writing. Please find it.
```
Projects.zip
- DAB_40V_Ver7 : Write to RAM。It works fine.
- DAB_40V_Ver8 : Modify above project to write flash. It cannot work.
Environment1, 2.PNG : Specific environments on CCS
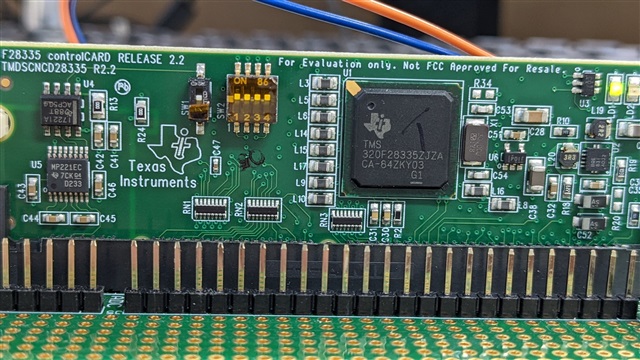
Pin_settings.jpg : A pin settings on control CARD of F28335
Result.PNG : Debug window on CCS
Waveform on GPIO 00 by DAB_40V_ver7.jpg
```
And I used CCS(9.3.0.00012).
I want any advice to fix this issue.
Best Regards,
Eto