Hi team.
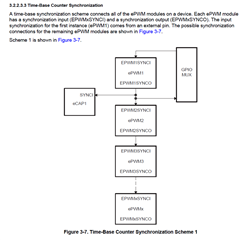
Is there any way that I can introduce phase shift between two sawtooth's (EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; and EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP;) that are used in PWM.
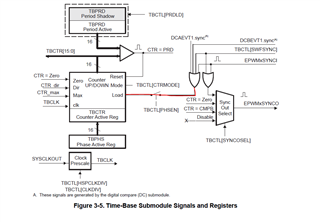
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm1Regs.TBPRD = EPWM1_TIMER_TBPRD; // Set timer period
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm1Regs.TBPHS.half.TBPHS = 0x0000; // Phase is 0
EPwm1Regs.TBCTR = 0x0000; // Clear counter
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV2; // Clock ratio to SYSCLKOUT
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV2;
//Other things are removed to keep the code simple
EPwm2Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm2Regs.TBPRD = EPWM2_TIMER_TBPRD; // Set timer period
EPwm2Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm2Regs.TBPHS.half.TBPHS = 0x0000; // Phase is 0
EPwm2Regs.TBCTR = 0x0000; // Clear counter
EPwm2Regs.TBCTL.bit.HSPCLKDIV = TB_DIV2; // Clock ratio to SYSCLKOUT
EPwm2Regs.TBCTL.bit.CLKDIV = TB_DIV2;