- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Hi everyone :
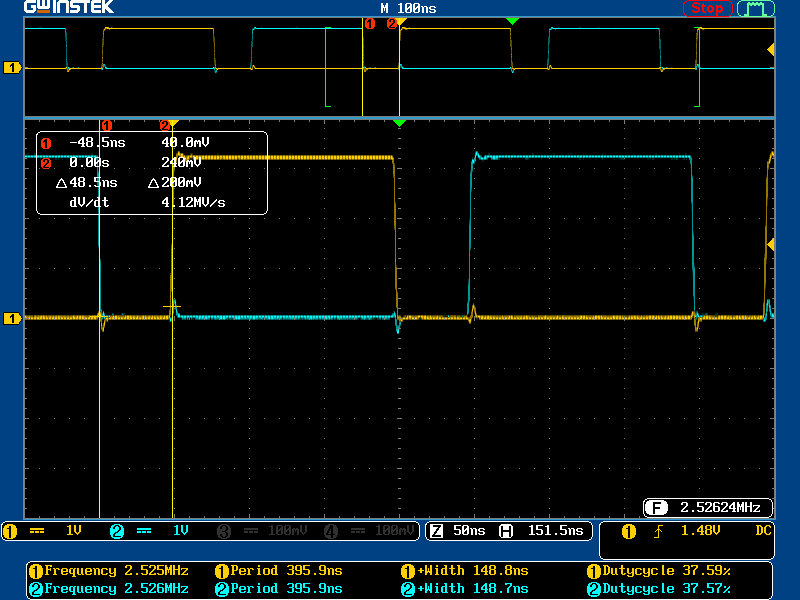
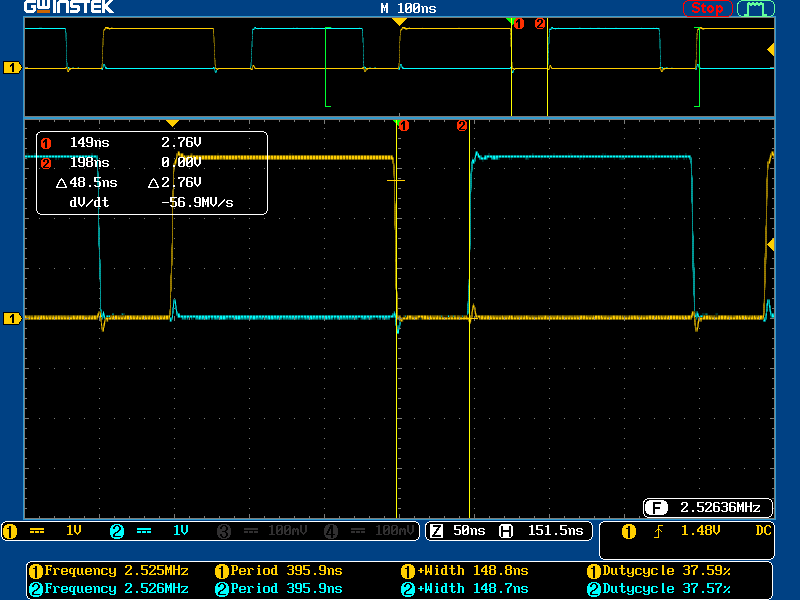
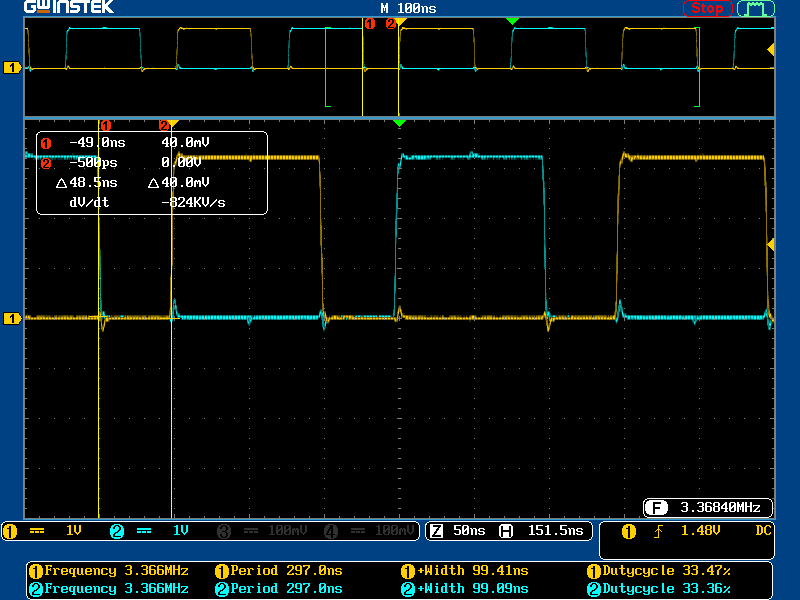
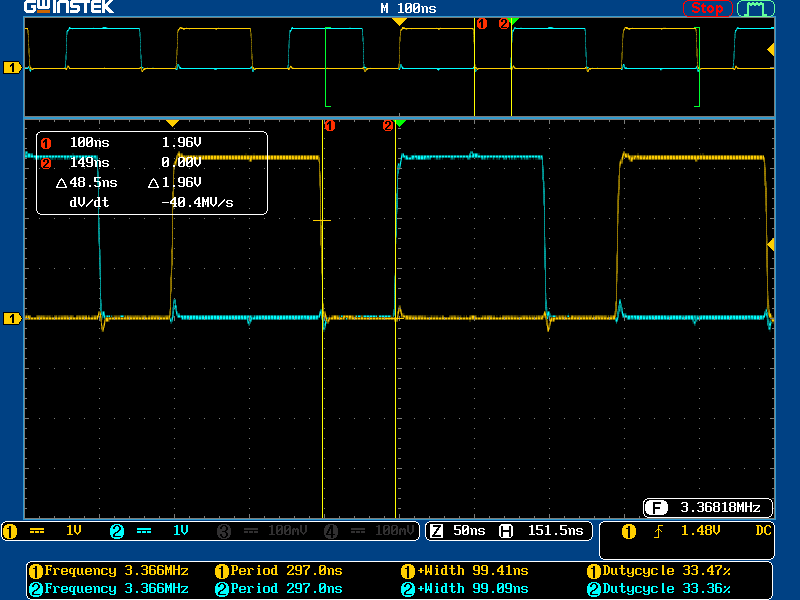
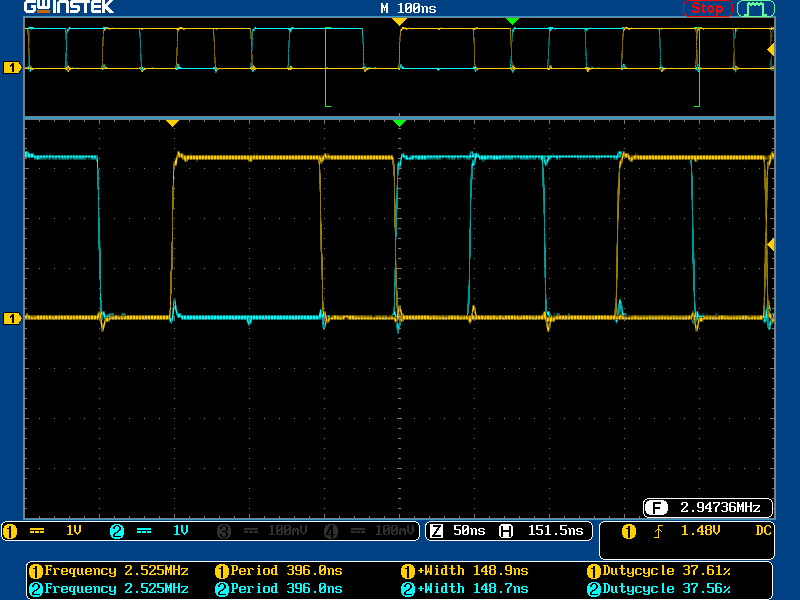
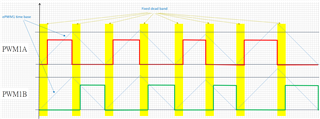
My goal is to keep the dead time of PWM1A and PWM1B constant when the frequency is changed. And the duty cycles of PWM1A and PWM1B are the same.
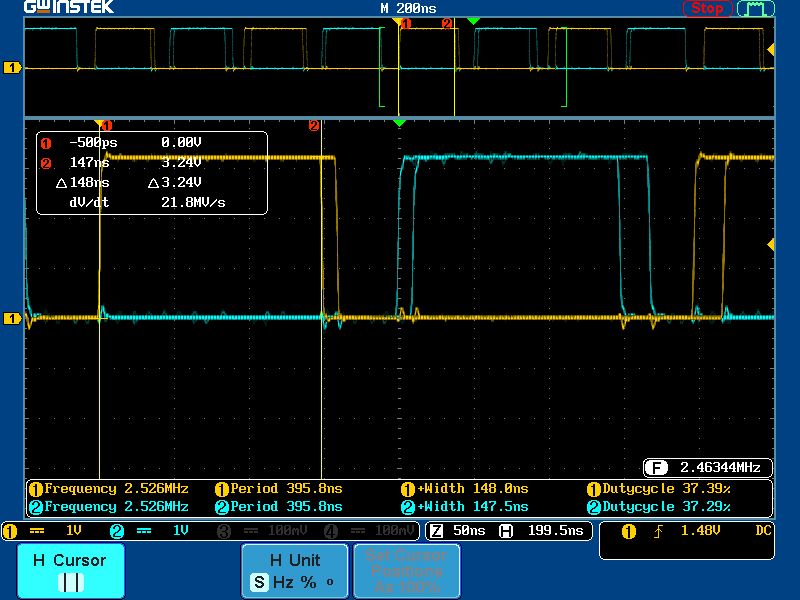
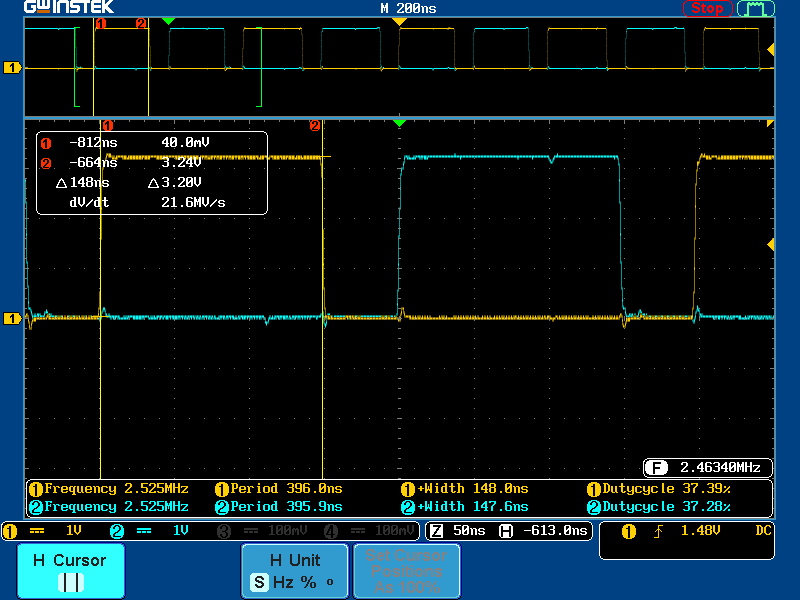
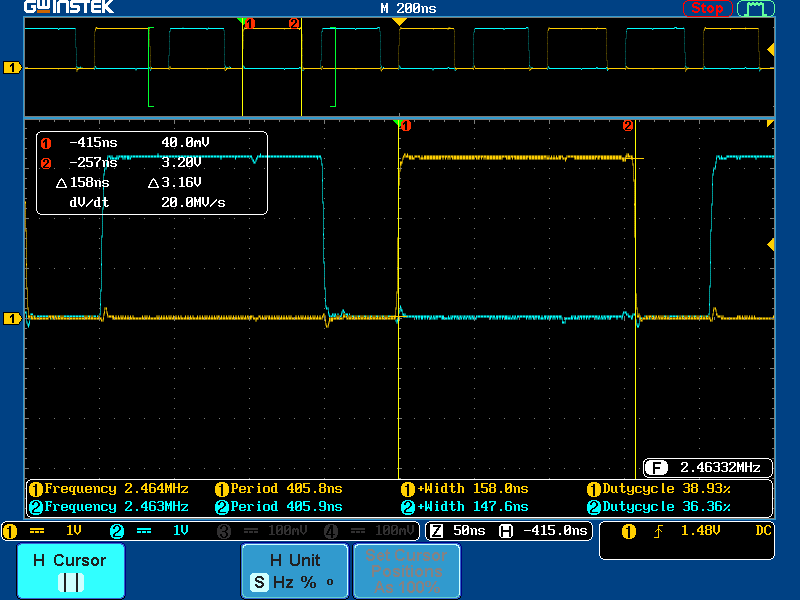
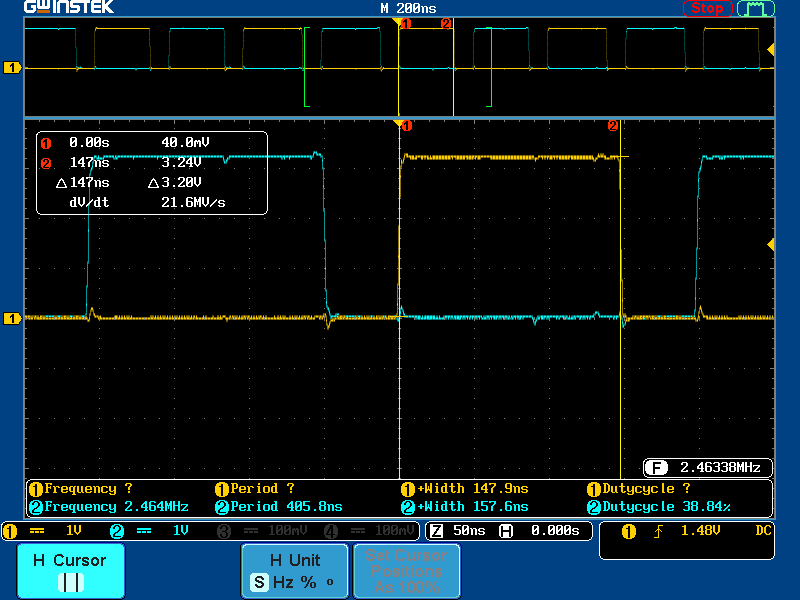
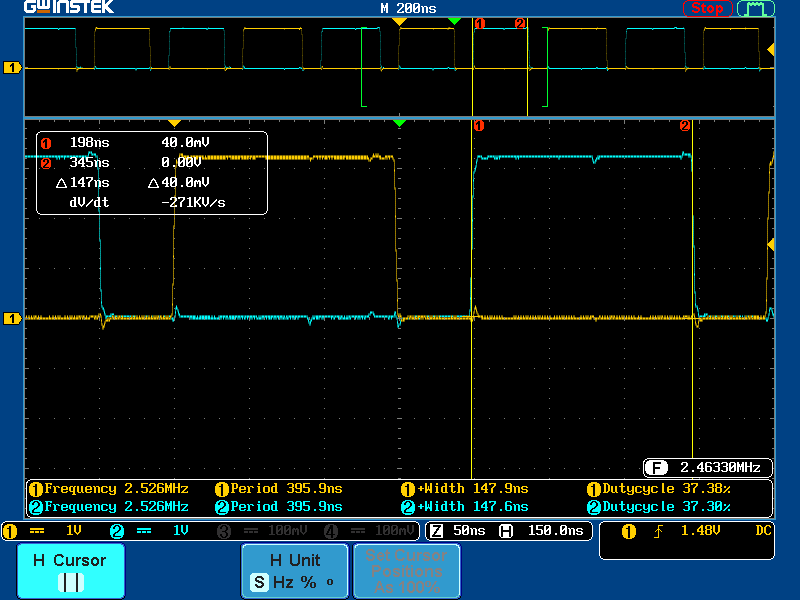
When using ePWM mode, my goal can be achieved, but when I turn on HRPWM, there is a count of jitters.
(The HRPWM MEP Scale Factor Optimization (SFO) library has been used.)
Please give suggestions, thank you!