Other Parts Discussed in Thread: DRV8305, , MOTORWARE, TMDSEMU200-U
My application is to rotate BLDC motor from RPM 5000 to 10000. When I am using TI's Launchpad XL Tms320f28027f with DRV8305 motor is rotating as per my requirement.
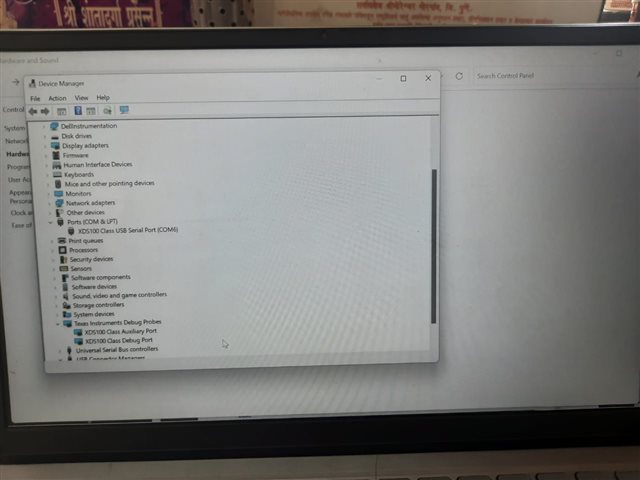
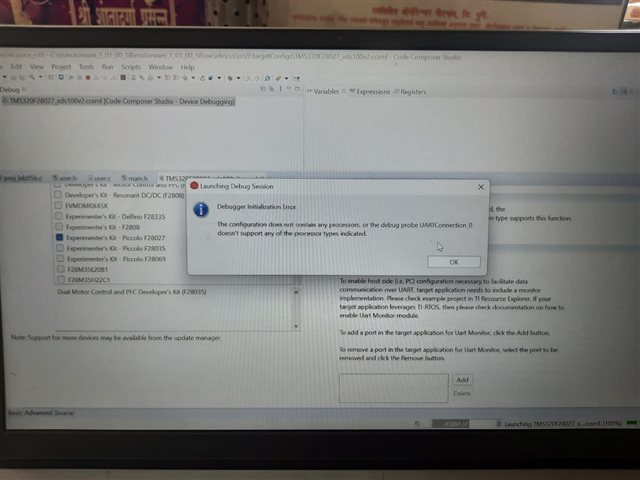
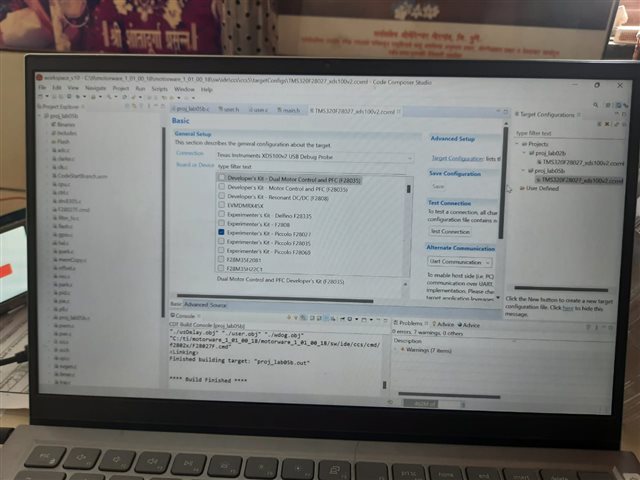
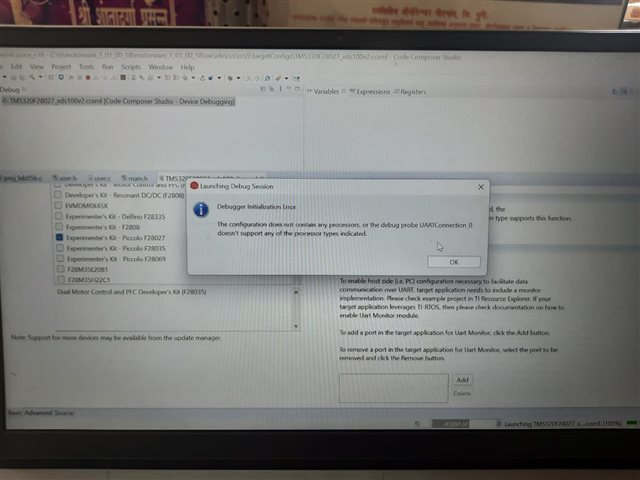
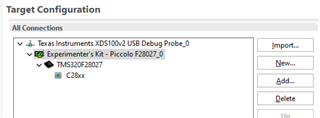
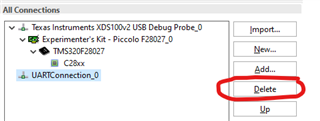
But If i want make my own hardware based on TMS320F28027f, reffering the C2000 Piccalo Launchpad schematic. I have the C2000 Piccalo Launchpad and it has XDS100 JTAG debugger. Can i use this debugger for Debugging the code on my Custom Board ? If yes, How it can be done ?
For doing this I have made following changes on Launchpad XL TMS28027F after reading LAUNCHXL F28027F Schematic :
1. Removed U1(TMS320F28027F) from board of Launchpad XL .
2. On my custom board where TMS320F28027F is present (which i want to program) following signals i have connected from custom board to Launchpad XL from where U1 IC is removed.
Signals are:
| Custom Board (J10 Connector) | Launch Pad XL TMSF28027F | Purpose |
| TCK | U5 pin no 14 (TCK) | JTAG Signals |
| TDI | U5 Pin no 13 (TDI) | JTAG Signals |
| TMS | U5 Pin no 12 (TMS) | JTAG Signals |
| TDO | U7 pin no 3 (TDO) | JTAG Signals |
| JTAG_TRST | U7 pin no 5 (JTAG_TRST) | JTAG Signals |
| SCI_TX | U5 Pin no 11 (SCI_RX) | Communication with GUI |
| SCI_RX | U7 Pin no 4 (SCI_TX) | Communication with GUI |

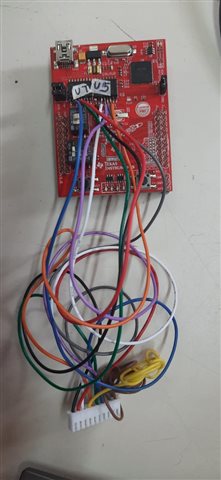
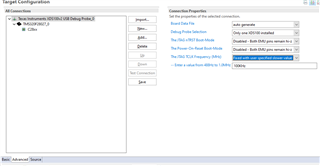
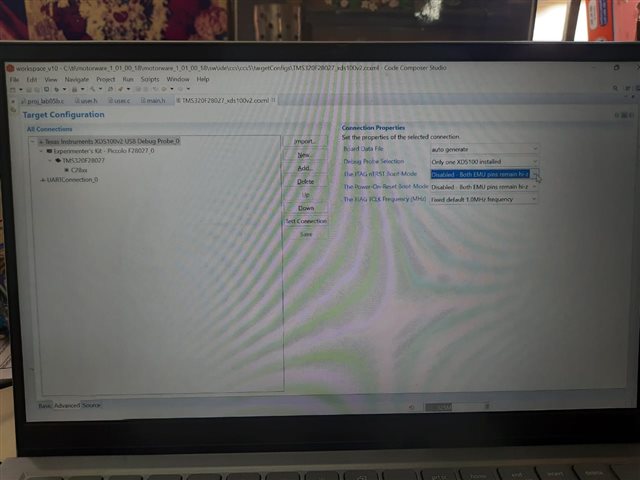
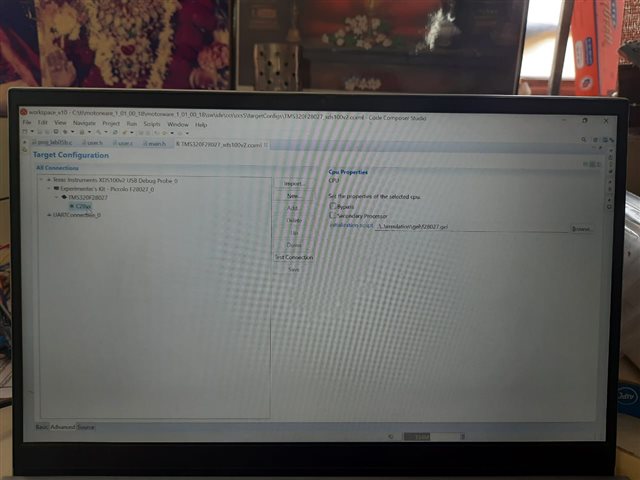
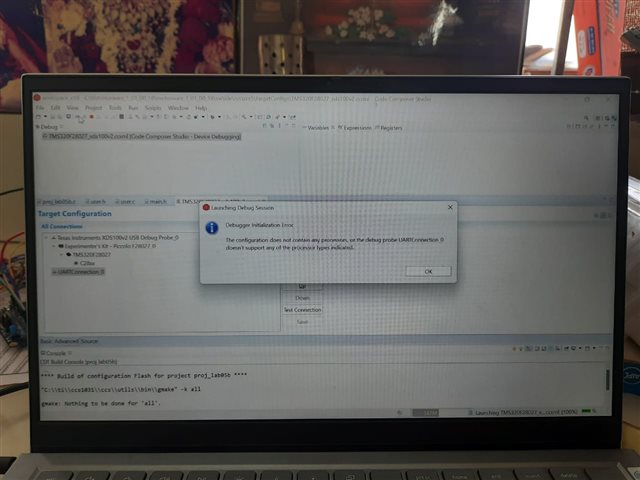
Images are attached for your reference.
I am using Instaspin Universal GUI . Program is getting downloaded successfully and application window also gets displayed. But the values of Bus voltage, Gain Parameters, RS,LS,Flux are not as per given in program and BLDC motor is also not rotating
Thanks
Vaishali