
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Tool/software:
Use the TM3200F28069M KIT board with the DRV8353RH KIT to conduct the motor operation test.
We first used Lab1b to enable open loop operation. The motor is equipped with a position sensor with a resolution of 1024PPR and a QA.QB.Index signal output.
We query the corresponding TI Lab sample program for Lab 12a.
, the include HAL files are hal.c and drv8353.c of drv8353.
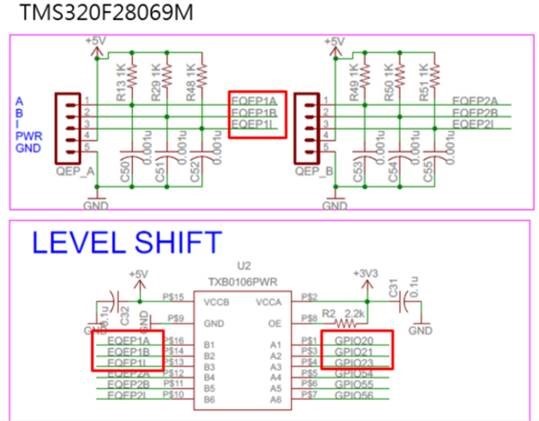
We have also confirmed that PWM, GPIO, ADC, and QEP announced GPIO Number pins.
The motor parameters have been adjusted using the parameters FAE and R&D tried.
Change the value according to the specifications of each PDF file. The program receives the Encoder signal and calculates the rotor position.
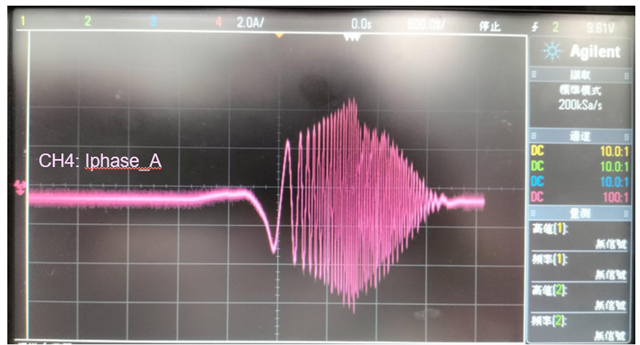
Running the Lab 12a program can start, but the motor stops soon, and the error message is gMotorVars.SpinTAC.VelIdErrorID 2003,
so if you have any questions, please ask:
1. The motor uses a position sensor Encoder. Is the corresponding sample program Lab 12a? Which one can be driven normally?
2. Does the Lab 12a sample program use the startup position sensor? How do we adjust so that we can all use position sensors to operate instead of Sensorless operation?
Please help with the above issues, thank you.






