Other Parts Discussed in Thread: TMS320F28069M, DRV8312, CONTROLSUITE
Tool/software:
Greetings,
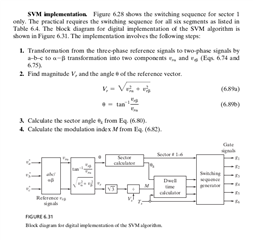
I am working with the PM_Sensorless project, for the DRV8312 and TMS320F28069M control card. I came across the SVGEN_DQ module, and I am unable to grasp the need for the 90 degree phase-shift that's been applied to the standard inverse-clarke transform, and the sector-determination algorithm.
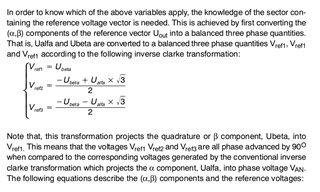
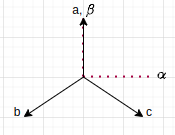
We have the modified inverse-clarke transform,
/* Inverse clarke transformation */ \ Va = v.Ubeta; \ Vb = -temp_sv1 + temp_sv2; \ Vc = -temp_sv1 - temp_sv2; \
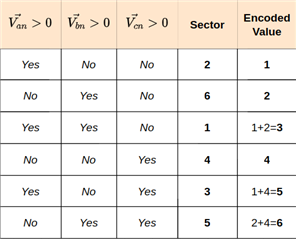
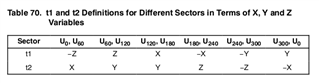
According to the sector determination code:
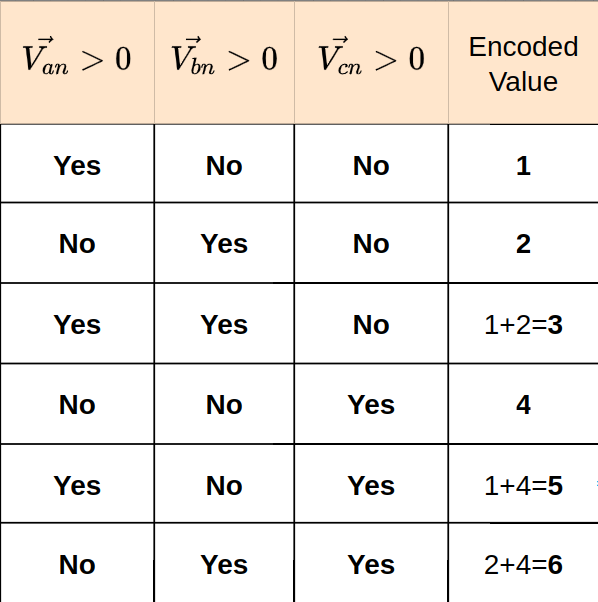
/* 60 degree Sector determination */ \ if (Va>_IQ(0)) Sector = 1; \ if (Vb>_IQ(0)) Sector = Sector+2; \ if (Vc>_IQ(0)) Sector = Sector+4;
I made this table (sector is initialized as 0):
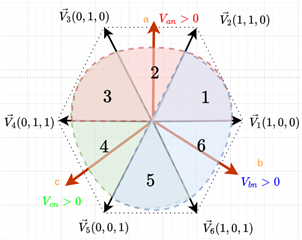
The regions where Va is positive, could be denoted by a semi-circle that's aligned with the phase-a vector. I have tried to visualize the regions as such:
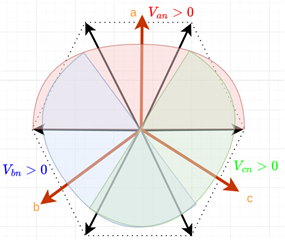
And when only Va>0, according to the table the sector should be 1, but it's actually in the 2nd sector,
When Va>0, and Vb>0, it should be sector 3, and that it is.
Yea, I am confused.
Kindly support, thanks!
Best Regards