Other Parts Discussed in Thread: MOTORWARE, TMS320F28069F, CONTROLSUITE, TMDSHVMTRINSPIN
Hi,
I use InstaSPIN FOC in my new design and I am trying to measure current with 3 Hall sensors.
My motor is: ACIM, 5,5kW
I define USER_IQ_FULL_SCALE_CURRENT_A, USER_ADC_FULL_SCALE_CURRENT_A, USER_IQ_FULL_SCALE_VOLTAGE_V, USER_ADC_FULL_SCALE_VOLTAGE_V correctly.
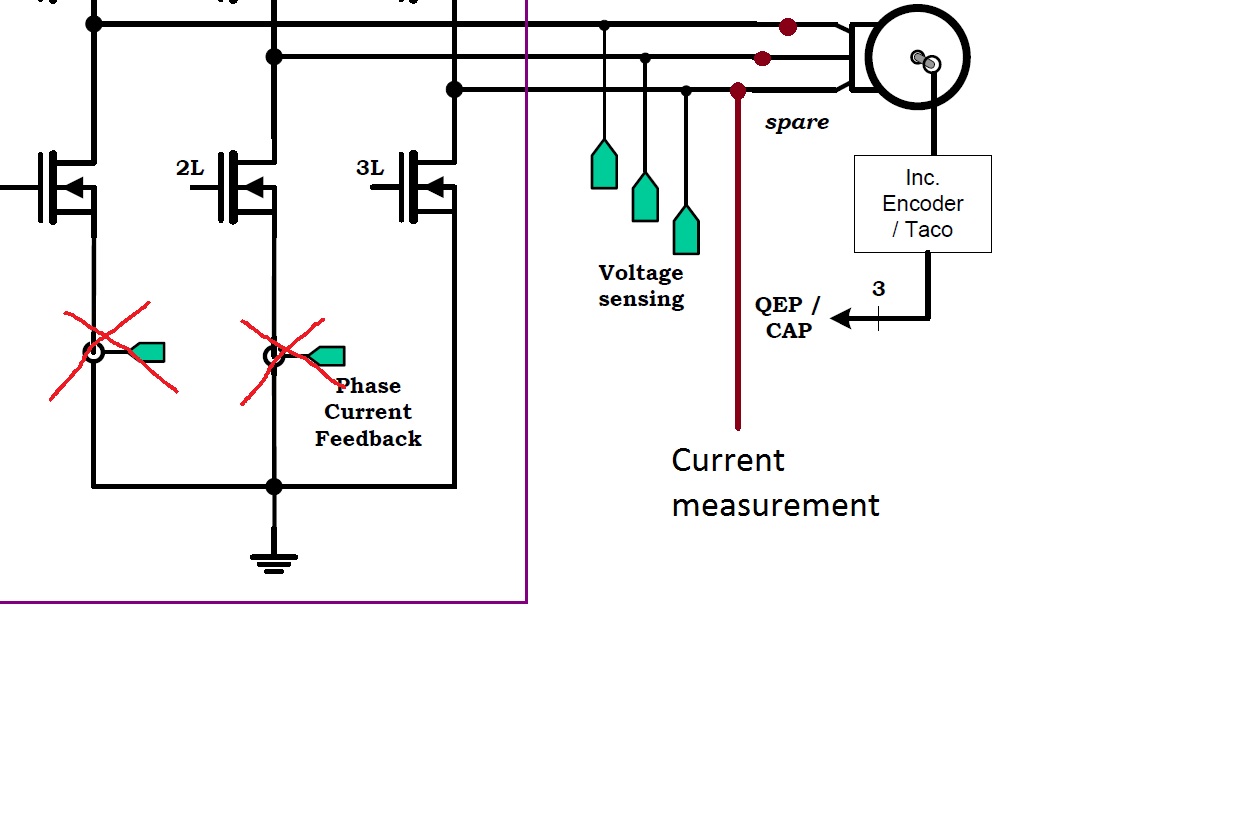
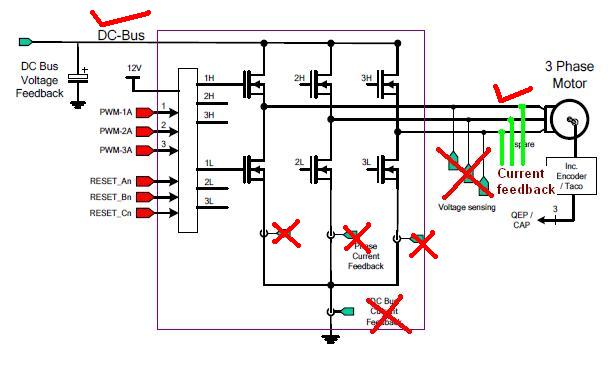
I didn't connect the sensors to transistors which are connected to the GND, but directly to the 3 phases of the motor.
So, I started the motor as it is explained in the PDF file but measured parameters of the identification are incorrect.
My question is what I have to define in the CCS program for correct current measurement?
Thank you!