


Other Parts Discussed in Thread: INSTASPIN-BLDC, MOTORWARE, BOOSTXL-DRV8301, DRV8301, DRV8312, LAUNCHXL-F28027F, CONTROLSUITE
I've worked my way through labs 1-5b and the motor spins decently at high rpm but at 100 rpm there is next to torque and and I can't get it to run below 80 rpm.
So went back to lab2c and to check the fundamentals and they seem a bit off and I'm not sure what to try next.
The motor is a dental handpiece motor with following spec:
The rotor has one internal magnet so I guess this is one pole pair, right?
Coil resistance is 1.2 Ohms
Inductance 120 uH
Bemf 6.67 mV/(rad/ss)
Max continuous current 2.5 A (rms)
Max peak 10 A (rms for 10 sec)
Max rpm at 24 V is 42 000 rpm
But this what I get in lab2c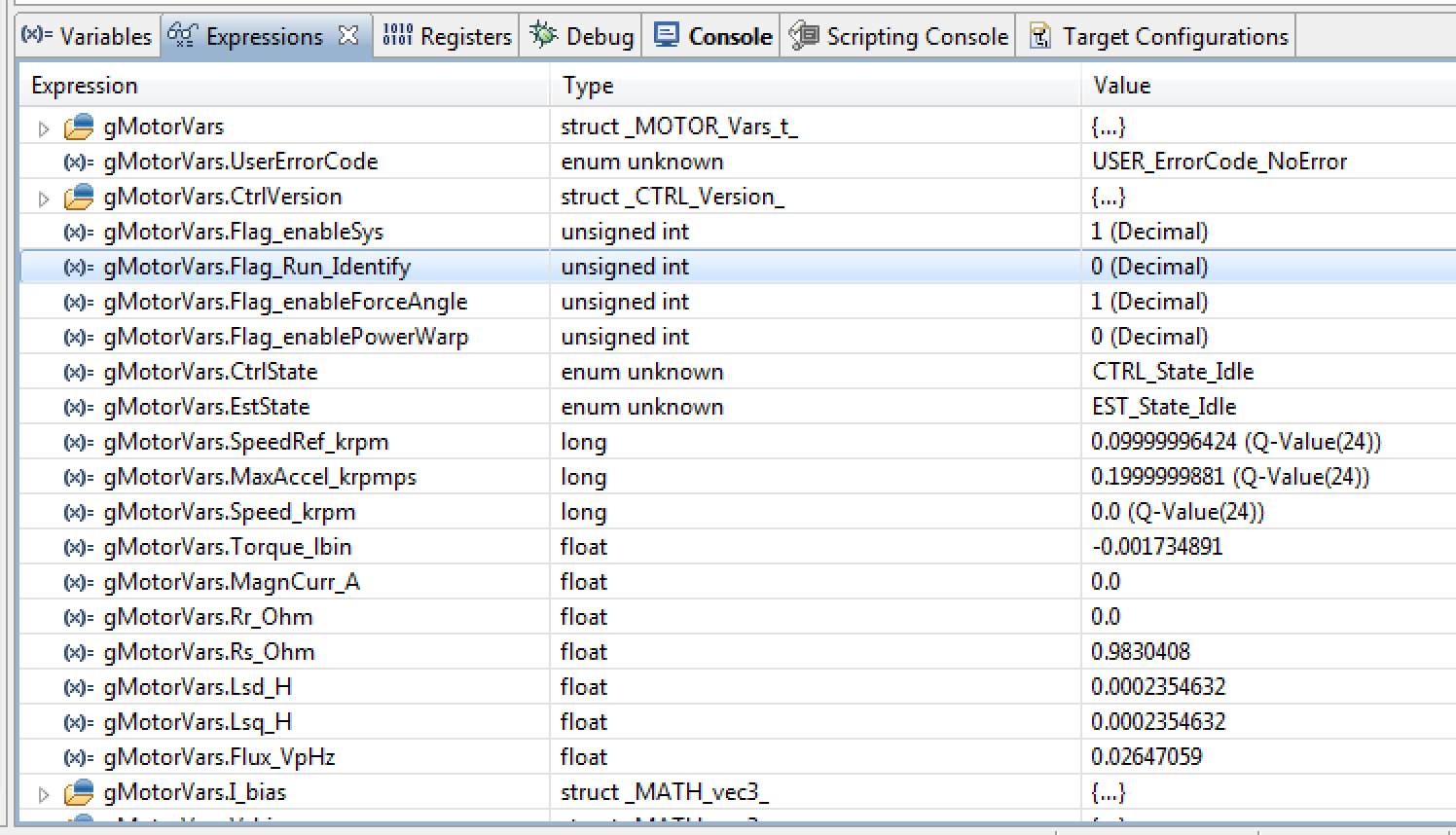
So it looks like resistance is a bit low (measured 0.98 should be 1.2), inductance is way about double of what it should be high (measure 235 uH should be 120 uH) and the back emf (if I got that right) is about half of what it should be (measures as 26.4 mV/rpm when if my math is correct it should be about 42 mV/rmp).
Is my number of poles wrong or measurement frequency off or what?
My user.h file attached.
A related question is if I'm on the right track at all using InstaSpin FOC/FAST for this motor?
Should I be concentrating on the InstaSpin BLDC instead?
My goal is to run this at 60 rmp with as much torque as possible of course.
This motor has no sensors and very low or nil saliency so none of the techniques we have found from the literature and tried to figure out the rotor position for commutation have worked so far at such a low rpm.
A related question is if I want to try InstaSpin BLDC do I need to go back to DRV8312EVM board or can I try it out on the BOOSTXL and Launchpad combo?
br Kusti

