Hello,
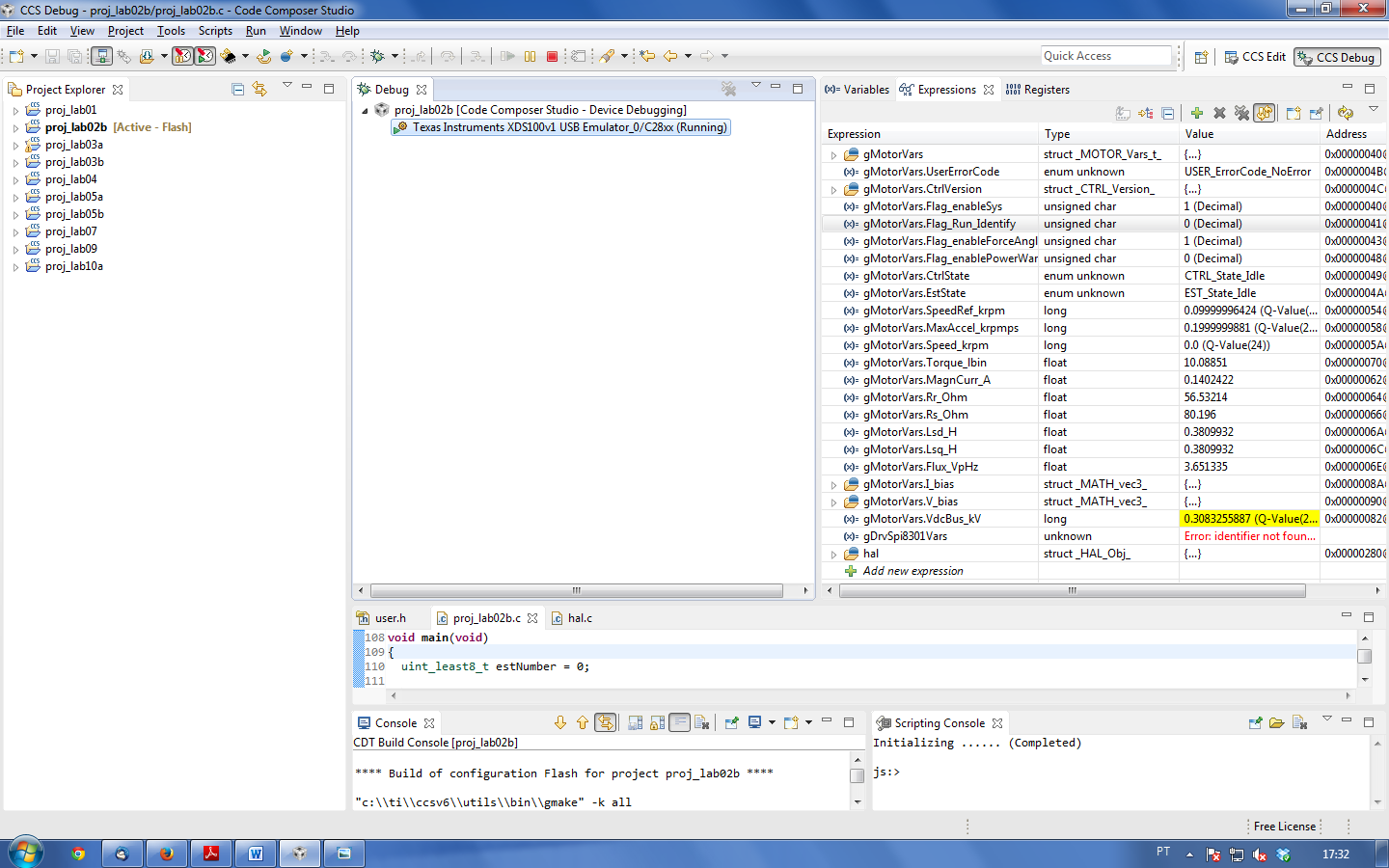
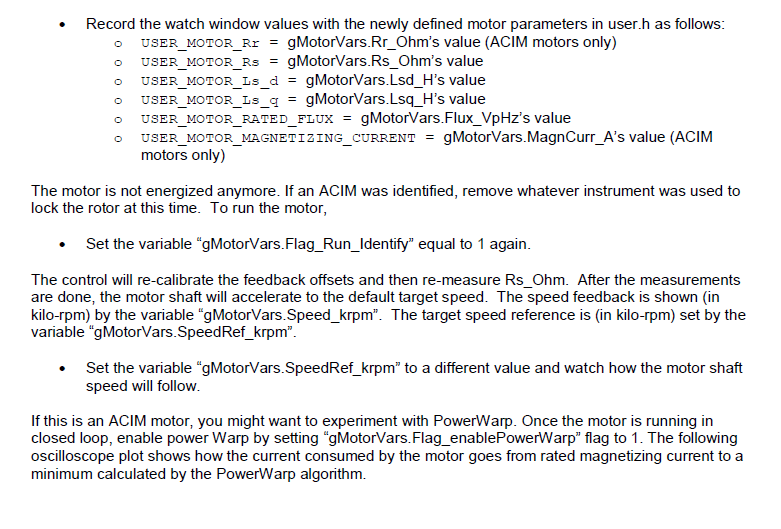
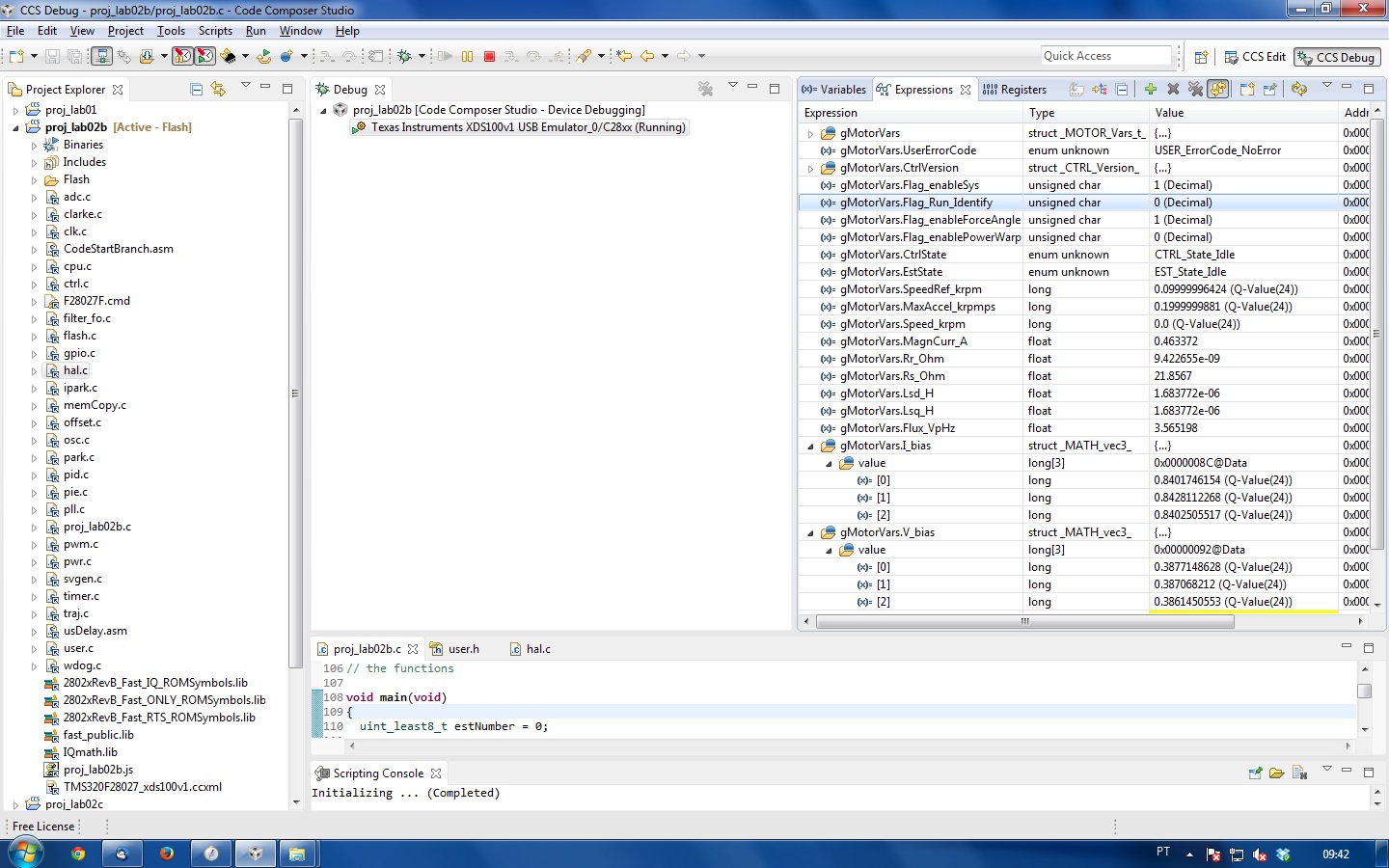
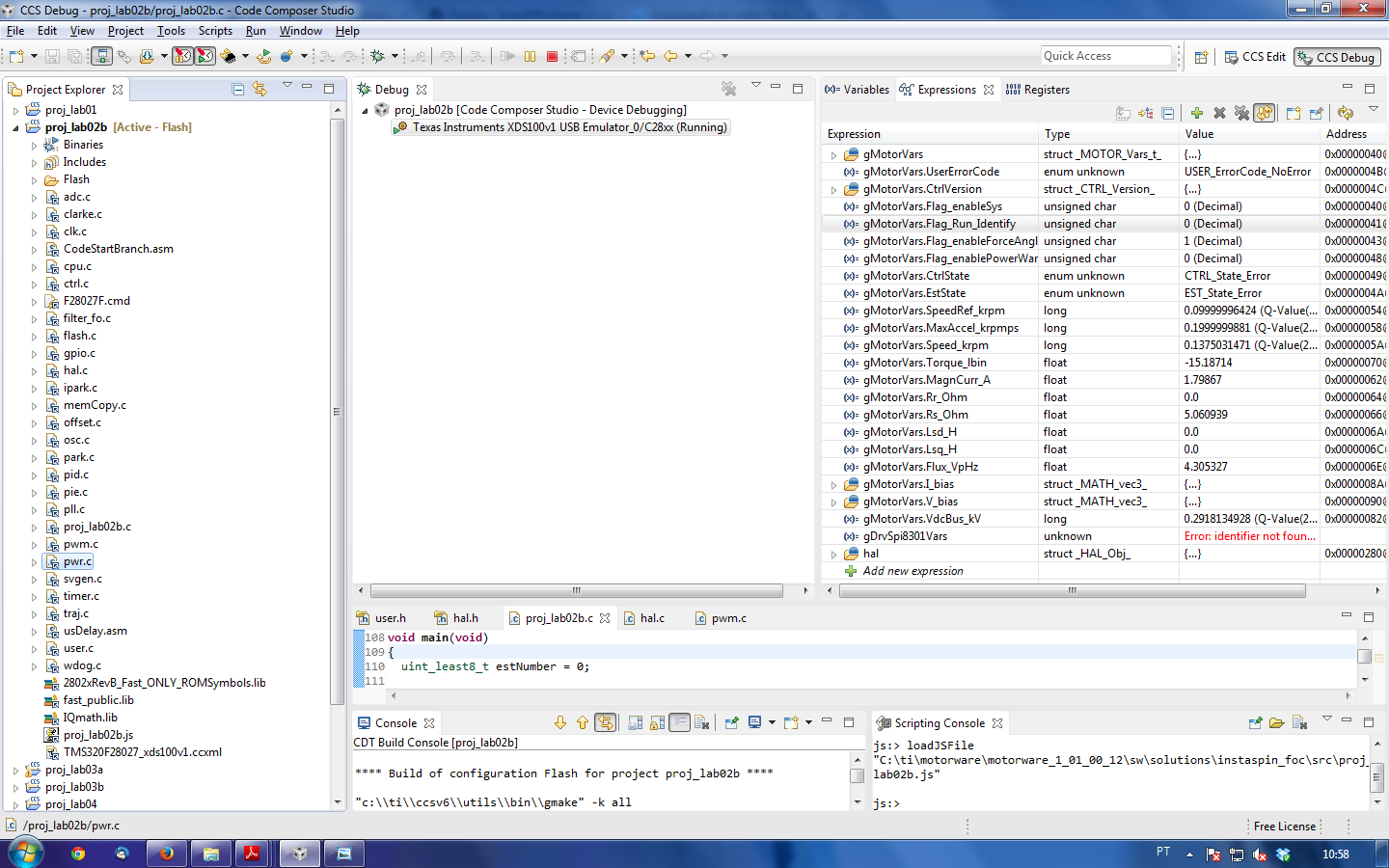
Sorry for bother you with a new post. I'm trying identify a small ACI motor that I have with InstaSPIN 28027F, but I can't finish the identification cause the EST_State return a error few seconds after the gMotorVars.EstState = EST_State_RatedFlux.
And few second after the Error:
I searched for some information about the behavior of motor throughout the identification and I didn't find anything,so I don't know if the motor's behavior it's the right or not fot this situation.
Add my user.h: 0083.user.h
Motor Specs (ABB Motors): (Delta Conf.)
1,9A
0.37 kw
50Hz
I followed the parameters and the design of the HV kit, so I don't know if I configured the user.h parameters correctly. Could you give me some tips if I'm doing some wrongly?
Thanks,
Bruno Ramos