Hi
I want to read the data from SCIRXBUF and transfer it to a variable so as to extract the value which is being transmitted bit by bit from my transmission module.
This is wat i am trying to do
int factor = 10000;
int number = 0;
both these defined as global variables.
do
{
factor = factor / 10;
while(ScibRegs.SCIFFRX.bit.RXFFST !=1) { } // wait for RXDY =1 for empty state,i.e until FIFO has one word
// Get character
a = ScibRegs.SCIRXBUF.all;
number = number + (a * factor);
}while(factor>=1)
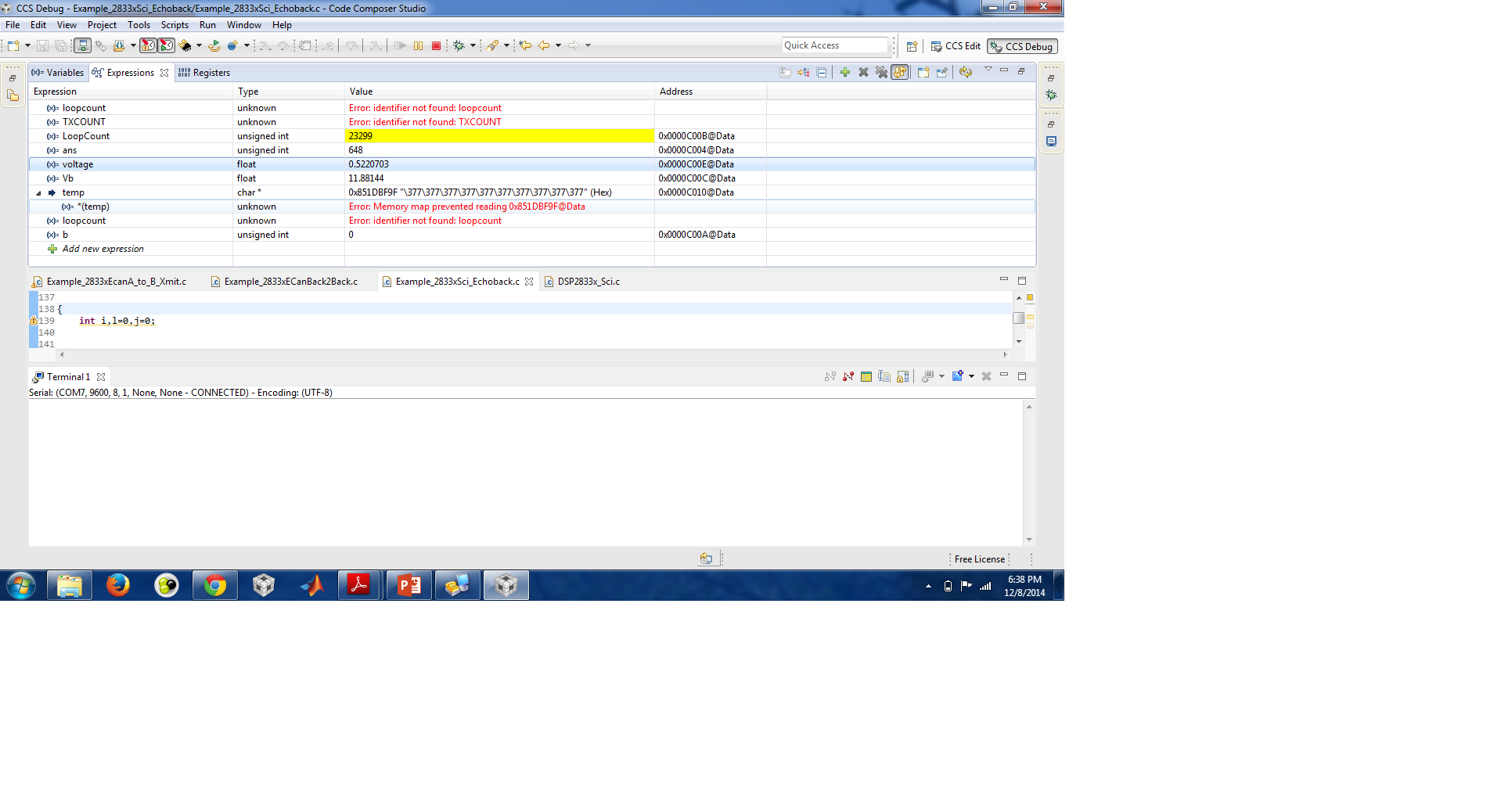
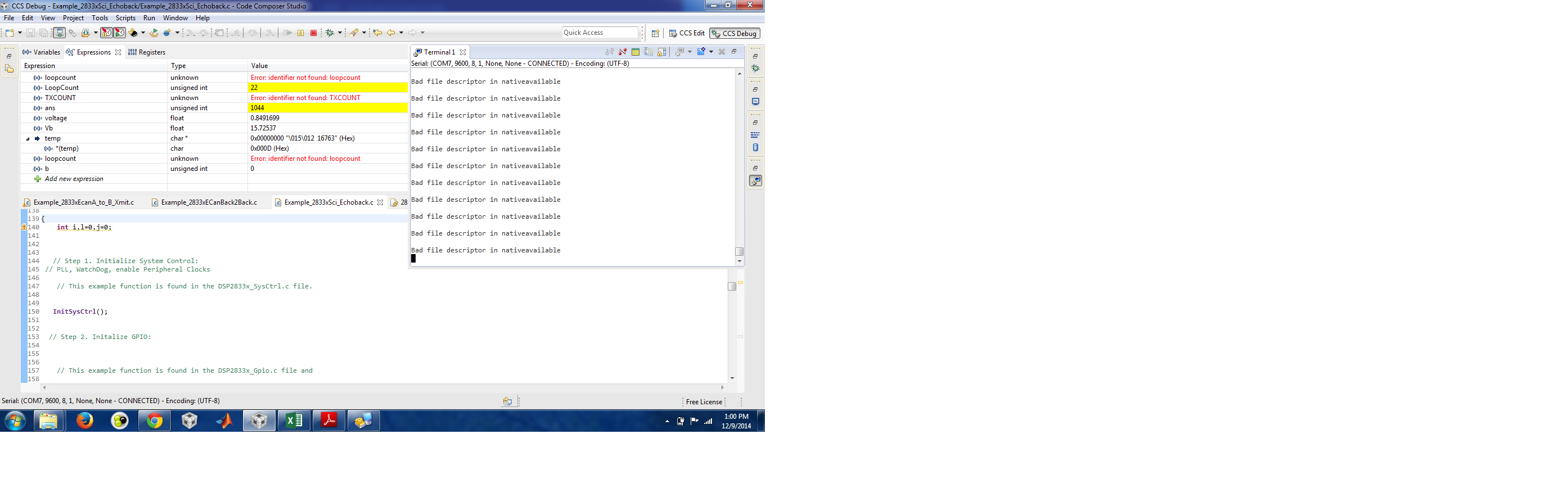
But when I check the variables on watch window..Factor=10000,number = 0,a =unidentified
please help
thanks
Sneha