


Other Parts Discussed in Thread: DRV8301
Dear Sir /Madam,
I have problems during the inductance identification in Lab 2a. The motor does not spin and sometimes overcurrent protection flag of the mosfets driver is raised (custom HW)
Resistance and Rated Flux are identified correctly.
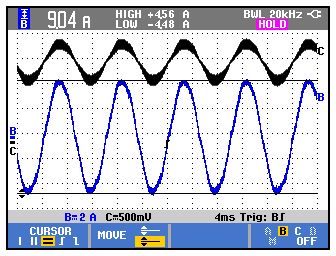
I have ploted phase currents during the RoverL step in order to validate both power and measurement circuits. The figure shows the current in phase U (blue) and Current Phase A after the current sense circuit and filters during the RoverL steps. It seems to be OK. (Phase V and W are similars)
The identification runs OK until the inductance identification process. The motors stops suddenly and starts to vibrate (sometimes the short circuit protection of the drivers is raised) no matter the current used.
I have also used the DRV8301 evaluation boards to make this identification and it is correctly performed.
// DELTA_ME080AS104
#define USER_MOTOR_TYPE MOTOR_Type_Pm
#define USER_MOTOR_NUM_POLE_PAIRS (2)
#define USER_MOTOR_Rr (NULL)
#define USER_MOTOR_Rs (0.009204548)
#define USER_MOTOR_Ls_d (0.00004952461)
#define USER_MOTOR_Ls_q (0.00004952461)
#define USER_MOTOR_RATED_FLUX (0.05395144)
#define USER_MOTOR_MAGNETIZING_CURRENT (NULL)
#define USER_MOTOR_RES_EST_CURRENT (7.0)
#define USER_MOTOR_IND_EST_CURRENT (-7.0)
#define USER_MOTOR_MAX_CURRENT (10.0)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (13.0)
#define USER_MOTOR_MAX_SPEED_KRPM (3.0)
#define USER_MOTOR_MAX_ACCEL (32.0) // Maximum acceleration (KRPM/s)
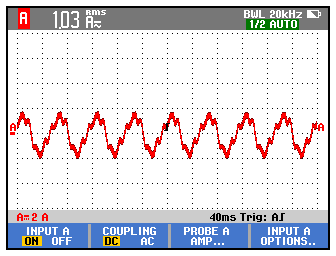
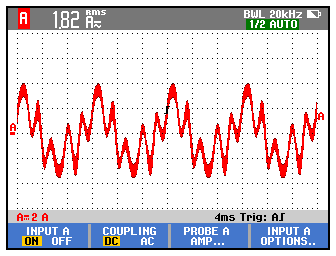
If we use the parameters identified with DRV8301 with our own HW and runs the Lab3B it works OK. We only have problems when the inductance has to be identified. Current Waveforms are not perfects, but it spins softly. The following image shows the Phase U currents when the motor is running at 500rpm and 2000rpm
I have read in previous post that lab2c should be used in case of low inductances, but in this case R/L = 185 (<< 2000)
I have also tested our HW with other motors (with higher L and R) and the identifications is performed OK. This higher resistance probably filters the signal allowing the L identification.
What can cause the motor to vibrate during the inductance identification step?





