- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Hi All
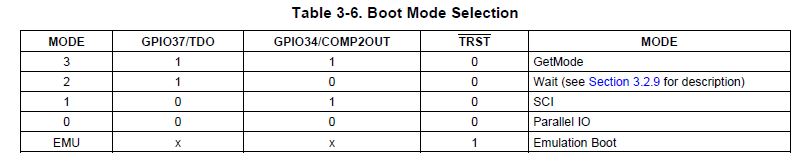
I am using the C2000 LaunchpadXL (TMS320F28027F). I ran the SCI Echoback example from the debugger in CCS with no problems and managed to send messages back and forth from a terminal. however, when I try to reboot the device in standalone mode, the messages coming through are garbage, almost as if the baud rate is wrong. Can anyone help with this? To boot in standalone mode I am just switching S3 off and leaving S1 and S2 on. S4 is on so I can communicate via usb.
Thanks in advance
Matt