
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Dear SpinTAC team,
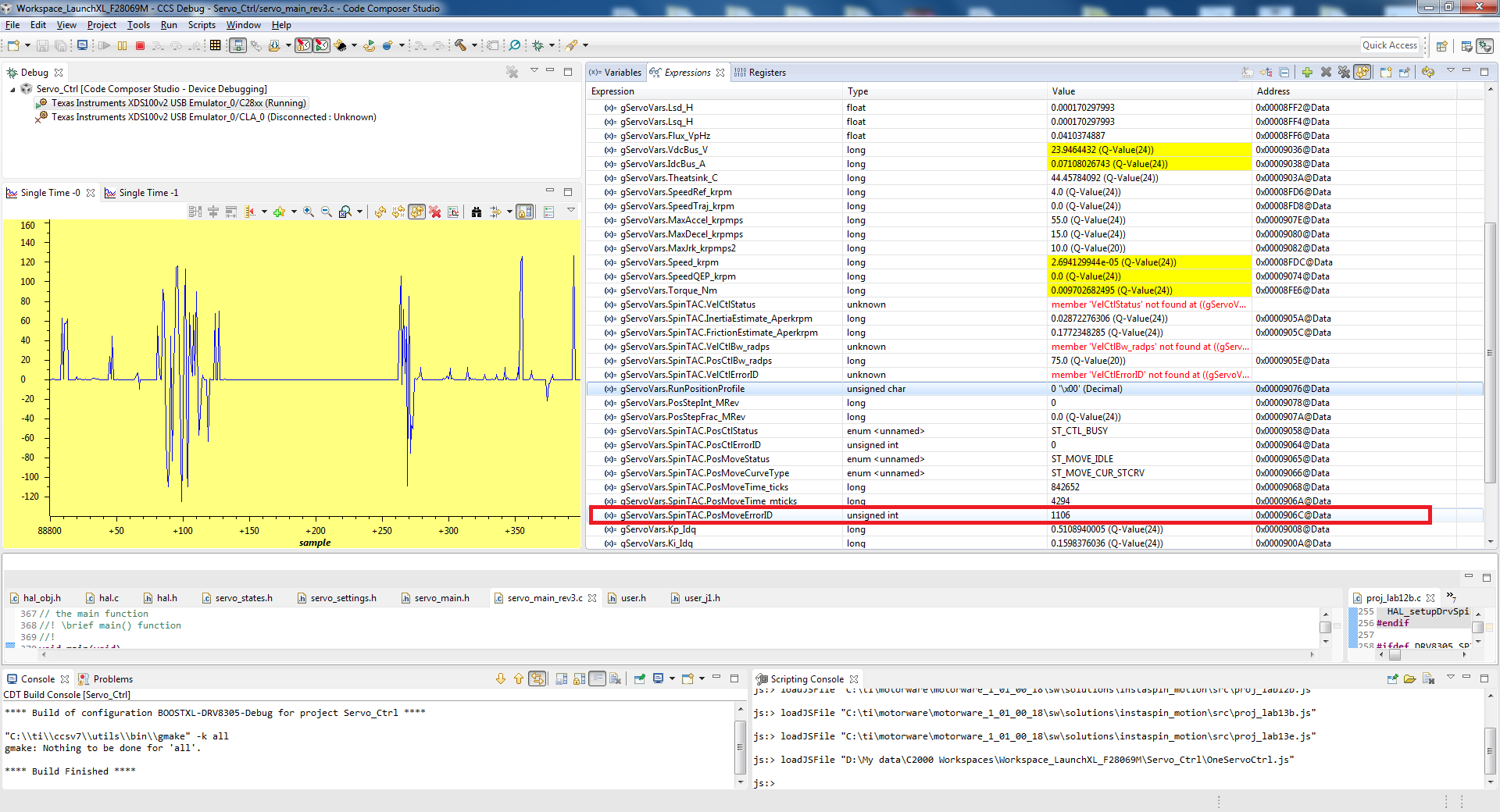
I'm working with Prj_lab13b and Prj_lab13e in order to control a PMSM motor at very low speed. When I try Prj_lab13b with another motor which was controlled successfully with Sensorless FOC, then I met the following error, the error code #1106
I looked up to find the meaning of this error code, but in the SPRUHJ1F document only described the error 1105. So that please let me what the meaning of error code is?
Thank you!



