Part Number: LAUNCHXL-F28069M
Other Parts Discussed in Thread: CONTROLSUITE
Hi,
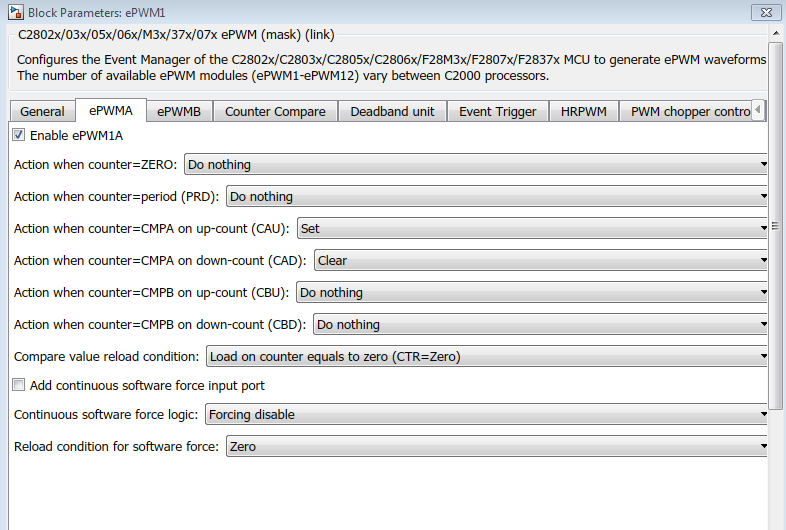
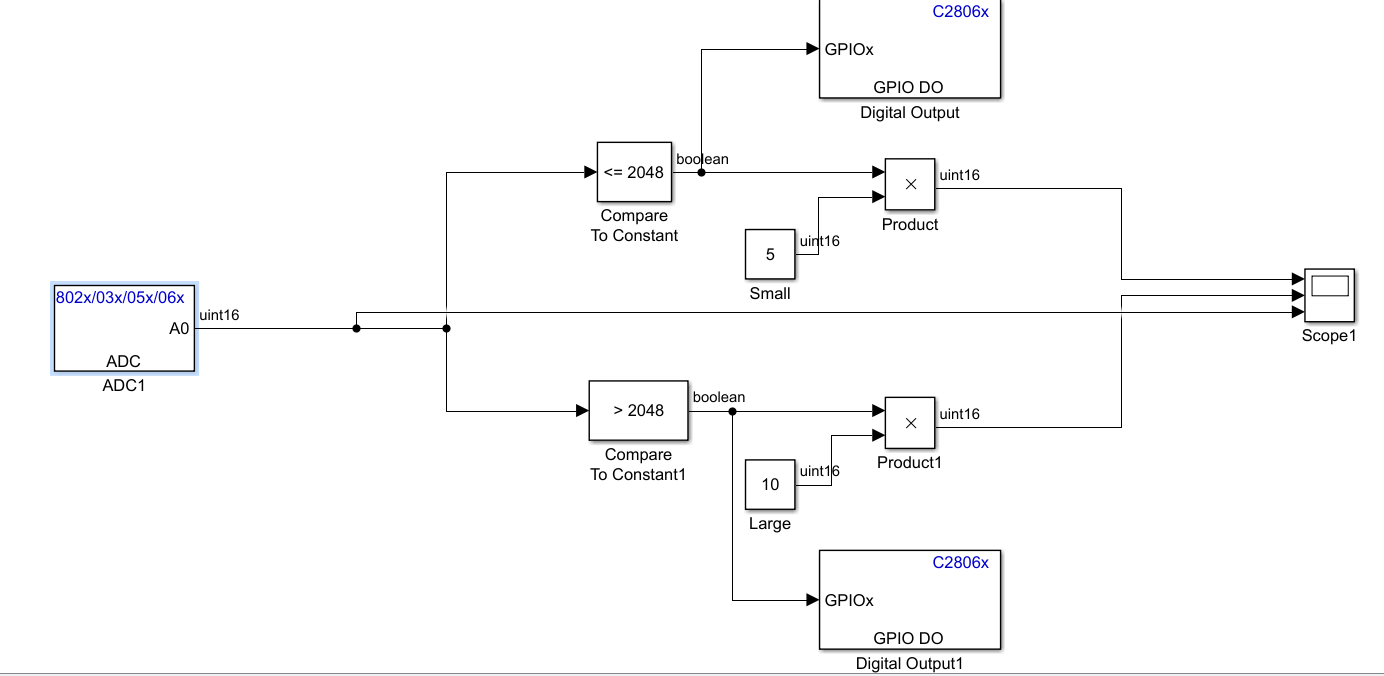
I made simple model in simulink to analyze ADC. When I connect ADCINA0 to GND and then ADCINA0 to 3.3V then it works perfectly with ADC goes from 0 to 4096 when I change GND to 3.3V .
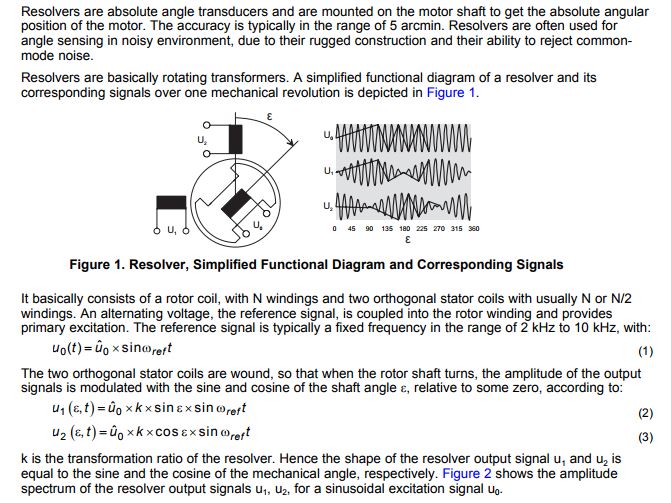
When I am floating the ADC pin then it gives me range of values which is not surprising. But when I connec this ADC to the sinwave(10khz,2.04P-P) which I took from my motor's sensor then it does nothing.
I have set ADC sampling time to 10 times more the freq. of my wave (usually twice according to nyquist sampling theorem).
I have been stucked on this HW interface since LAUNCHXL-28069M doesnt have resolver interface and that is the reason I have to sort out this problem.
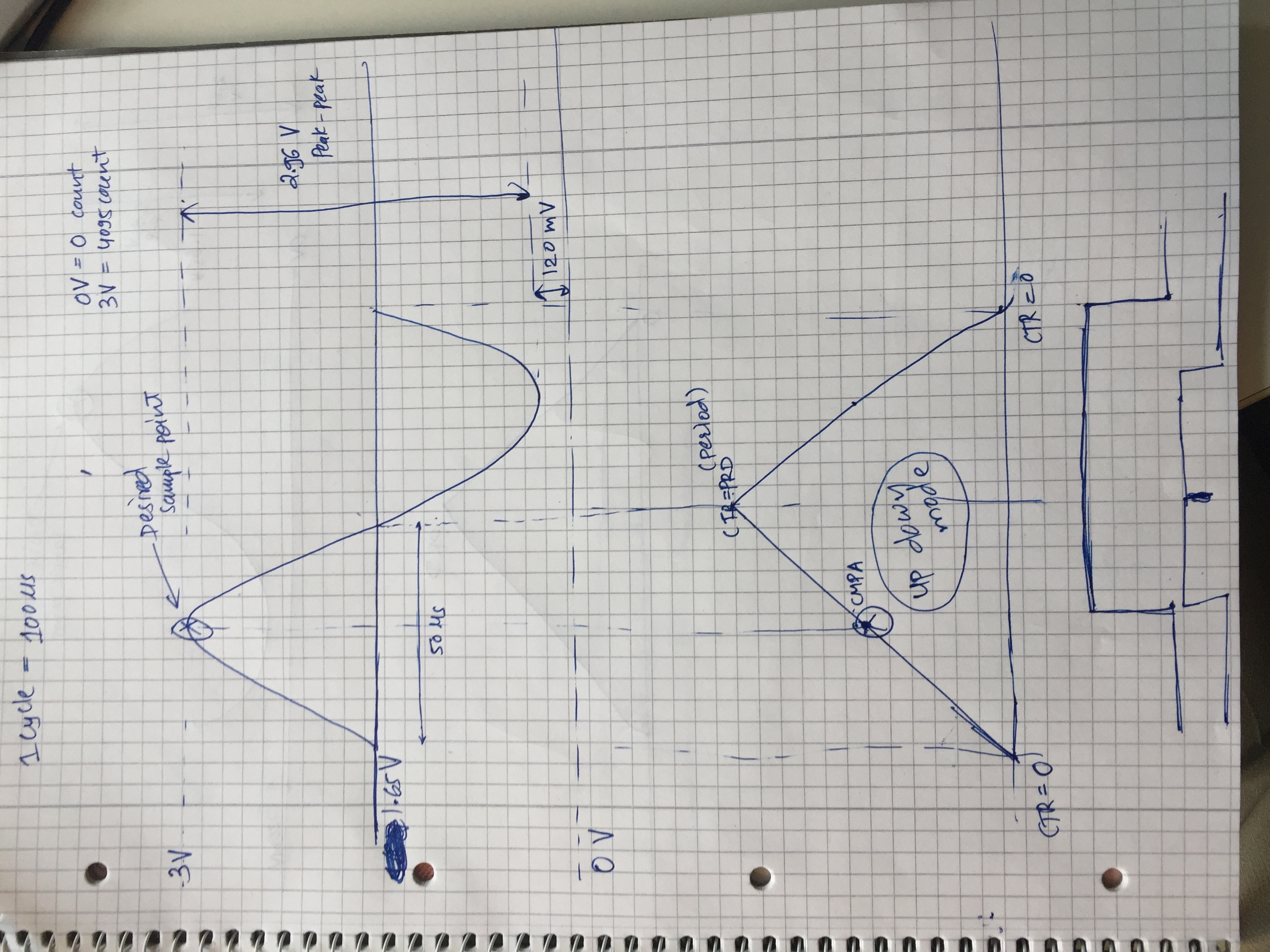
I have attached simulink model and set parameters. Can anyone help me how to use ADC?
thank you.



regards
Rahul