



Part Number: TMS320F28379D
Tool/software: Code Composer Studio
Hi,
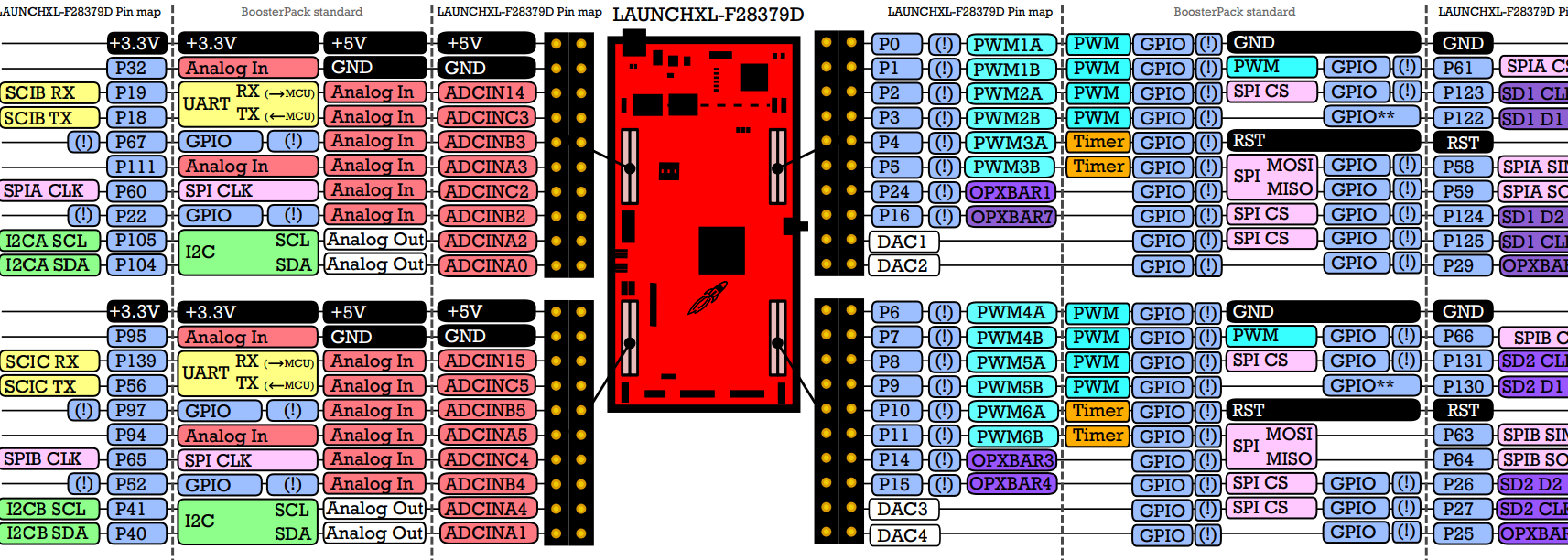
I wanted to know how the gpio pins are assigned for the c2000 launchpad. Gpio numbers are not given. so Im confused about it.
Also, I'm currently running can loop feedback interrupt code. How do i check the output for CAN? I'm trying to connect it to GPIO 30 or any pin to read the information transmitted via CAN. If I connect it CAN_H and CAN_L, then would be seeing outputs from GPIO 12 and 17 pins(since schematic shows that GPIO12 and GPIO17 are directly connected to internal Transceiver) or the pins that I'm initializing it with? Say, if i have a motor which sends information via CAN and i want the can on c2000 to work as loop feedback interrupt code which uses internal Transceiver, would it work?

